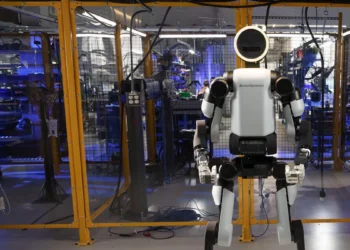
Des chercheurs japonais ont mis au point un système de préhension robotique capable de manipuler des objets transparents ou réfléchissants avec une simple caméra RVB. La technologie, développée à l’Université des sciences de Tokyo, contourne les limitations des capteurs de profondeur traditionnels et atteint 96% de réussite. Elle pourrait faciliter l’automatisation dans l’industrie manufacturière et la logistique.
La manipulation d’objets transparents ou brillants constitue depuis longtemps un défi technique pour les systèmes robotiques. Alors que les capteurs de profondeur, largement utilisés dans l’automatisation industrielle, échouent face au verre ou au métal poli, une équipe de recherche japonaise propose une solution élégante reposant sur une technologie plus simple et moins coûteuse.
Une approche géométrique plutôt que sensorielle
Le système HEAPGrasp, développé par Shogo Arai et Ginga Kennis de l’Université des sciences de Tokyo, adopte une philosophie radicalement différente des méthodes conventionnelles. Plutôt que de tenter de mesurer la profondeur de surfaces qui déforment ou absorbent les signaux infrarouges, il se concentre sur ce qui reste visible : les contours des objets dans une image couleur standard.
La méthode, détaillée dans l’IEEE Robotics and Automation Letters, utilise un algorithme de segmentation sémantique pour distinguer l’objet de son arrière-plan. En capturant plusieurs images sous différents angles avec une seule caméra, le système reconstitue la forme tridimensionnelle par une technique géométrique éprouvée, le Shape from Silhouette. « Même lorsque les informations de profondeur ne sont pas fiables, l’estimation de la forme des objets et la préhension restent possibles tant que les contours ou les silhouettes de l’objet peuvent être capturés de manière fiable dans les images », explique Shogo Arai.
Optimisation du mouvement et performances
L’intelligence du système réside également dans sa capacité à minimiser les déplacements. Un planificateur de pose, alimenté par des algorithmes d’apprentissage automatique, détermine les angles de vue les plus informatifs pour compléter la reconstruction 3D. L’optimisation permet de réduire considérablement le temps et l’énergie consacrés à l’acquisition des données.
Sur vingt scènes de test comprenant des objets aux propriétés optiques variées, HEAPGrasp a atteint un taux de réussite de 96% pour les opérations de préhension. Comparé à une méthode nécessitant un balayage complet de l’environnement, le système a réduit la trajectoire de la caméra de 52% et le temps d’exécution total de 19%. « Notre approche permet une mesure 3D précise des objets tout en minimisant les mouvements de la caméra et le temps d’exécution », précise Ginga Kennis.
Perspectives industrielles et limites potentielles
La simplicité matérielle de cette solution ouvre des perspectives concrètes pour l’automatisation. Les chaînes de montage automobile manipulant des pare-brises, les entrepôts logistiques traitant des emballages plastifiés ou les cuisines industrielles utilisant des récipients en verre pourraient bénéficier de cette technologie sans investissement majeur en nouveaux capteurs.
La méthode présente cependant certaines contraintes. Elle repose sur la capacité à distinguer clairement les contours de l’objet, ce qui pourrait poser problème dans des environnements encombrés ou avec des arrière-plans complexes. La reconstruction à partir de silhouettes peut également être moins précise pour des objets concaves ou présentant des cavités importantes.
Historiquement, la robotique de manipulation a connu plusieurs révolutions successives : des pinces mécaniques programmées aux systèmes à vision stéréoscopique, puis aux capteurs de profondeur Time-of-Flight. Chaque avancée a résolu certains problèmes tout en en créant de nouveaux. La proposition de l’équipe japonaise s’inscrit dans cette lignée, non pas comme une rupture technologique absolue, mais comme une adaptation pragmatique aux limites des outils existants.
L’intégration potentielle avec des systèmes robotiques déjà déployés constitue son principal atout. « En réduisant la quantité de préréglages nécessaires, HEAPGrasp simplifie la mise en œuvre et l’exploitation sur site, d’autant plus qu’il peut être adapté à des systèmes robotiques existants », souligne Kennis. La compatibilité rétroactive pourrait accélérer son adoption dans des secteurs où la modernisation progressive des équipements prime sur les remplacements complets.
Alors que l’automatisation gagne des domaines toujours plus variés, la capacité à interagir avec une gamme étendue de matériaux devient un enjeu économique majeur. Les solutions qui, comme HEAPGrasp, parviennent à contourner les obstacles techniques par des approches algorithmiques plutôt que par l’ajout de matériel sophistiqué, dessinent peut-être une voie plus durable pour le développement de la robotique industrielle.
Article : « HEAPGrasp: Hand-Eye Active Perception to Grasp Objects with Diverse Optical Properties » – DOI : 10.1109/LRA.2026.3653331
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.