Ty Tkacik
Une équipe de recherche, incluant Huanyu « Larry » Cheng, professeur associé James L. Henderson Jr. Memorial en science et mécanique de l’ingénierie à Penn State, utilise des capteurs de pression — de petits dispositifs, à peu près de la taille d’une attache parisienne, qui peuvent mesurer la force appliquée sur une surface — pour concevoir une « peau » électronique hautement sensible à utiliser avec les robots et les membres prothétiques.
Cheng est l’un des auteurs correspondants d’un article, récemment publié dans Nano-Micro Letters, qui présente la conception améliorée du capteur de pression. Les capteurs de l’équipe peuvent être assemblés en un réseau interconnecté, offrant aux chercheurs et cliniciens une approche sans fil pour reconnaître la distribution spatiale de la pression, les gestes de la main et même différents types d’aliments en fonction de leur poids et texture.
Dans la Q&R suivante, Cheng a discuté de la technologie de détection de pression et comment le travail de son équipe pourrait aider les robots à « ressentir » avec précision la sensation du toucher.
Q : Pourquoi les technologies actuelles de détection de pression ont-elles du mal à concilier sensibilité et précision ? Comment avez-vous résolu ces problèmes avec votre nouvelle conception ?
Cheng : Il reste difficile pour les capteurs de pression flexibles d’atteindre simultanément une haute précision et une réactivité aux pressions subtiles, malgré des recherches et développements approfondis. Les conceptions conventionnelles fournissent souvent des réseaux conducteurs abondants, mais leur arrangement irrégulier affaiblit la résistance à la compression, ce qui limite la plage de détection et la stabilité à long terme.
Dans ce travail, nous avons conçu une plateforme de détection de pression flexible basée sur un matériau connu sous le nom d’aérogel d’oxyde de graphène réduit (rGOA) — un matériau incroyablement léger et riche en oxygène. En utilisant le moulage par congélation, une technique de fabrication qui solidifie les mélanges de liquides et solides en un seul matériau, nous pouvons former nos capteurs pour qu’ils aient une microstructure anisotrope, ce qui signifie qu’ils ont des résistances mécaniques différentes selon la direction où nous appliquons la contrainte.
Avec ces ajustements, nos capteurs peuvent simultanément atteindre une ultra-haute sensibilité, une large plage de détection de pression et une stabilité à long terme. Bien qu’un seul capteur ne mesure qu’environ huit millimètres, chacun peut supporter environ trois onces de force et charger et décharger un poids de manière fiable plus de 20 000 fois. En assemblant des capteurs individuels en un réseau interconnecté, nous pouvons créer efficacement une « peau » artificielle capable de mesurer avec précision des changements de pression extrêmement subtils.
Q : Comment les capteurs sont-ils construits ? Comment avez-vous testé leur efficacité ?
Cheng : Le capteur de pression a été fabriqué en insérant du rGOA entre un film synthétique semblable à du plastique estampillé avec des électrodes interdigitées — de petits dispositifs de mesure imprimés sur le matériau avec de l’encre d’argent — et une couche de matériau polymère mince à base de silicium. L’assemblage en sandwich des matériaux garantit un contact électrique stable, une robustesse mécanique et une flexibilité pour les applications pratiques.
Nous avons testé nos capteurs en mesurant la réponse du courant sous une large gamme de pressions appliquées, tout en évaluant la réponse en fréquence et la stabilité sous une gamme de températures et d’humidités. Nos capteurs se sont avérés extrêmement sensibles, offrant presque deux fois plus de sensibilité que les capteurs fabriqués avec des structures traditionnelles. De plus, les capteurs ont montré des temps de réponse et de récupération incroyablement rapides, répondant aux changements de pression en un peu plus de 100 millisecondes, et se remettant des réponses en seulement 40 millisecondes — un processus que d’autres options de capteurs peuvent mettre plus de 250 millisecondes à parcourir complètement.
Q : À quoi ressemble le processus d’assemblage des capteurs en une « peau artificielle » ? Quels types d’appareils et d’applications pourraient utiliser une telle peau ?
Cheng : Les capteurs peuvent être assemblés en un réseau, collectant de nombreuses mesures individuelles. À l’aide d’un microcontrôleur, un petit ordinateur conçu pour exécuter une tâche spécifique, ces signaux de pression sont collectés, convertis en valeurs numériques et visualisés en temps réel. Cela permet aux capteurs d’identifier la position et l’ampleur de la pression causée par différents objets, ce qui peut être utile pour les prothèses, la manipulation robotique et la surveillance de l’état des batteries.
La flexibilité des capteurs, leur ultra-haute sensibilité et leur stabilité environnementale permettent aux réseaux de s’adapter à des surfaces complexes pour une cartographie précise de la pression, un moyen de visualiser la quantité de pression entre deux surfaces. Ces capacités ouvrent de nouvelles possibilités dans la robotique intelligente, les wearables et les interfaces homme-machine, permettant la détection des changements de pression dynamiques provenant d’objets irréguliers ou de petits déplacements de volume. Une application clé est l’identification précoce du gonflement des batteries dans les véhicules électriques — un problème courant où l’augmentation de la pression interne peut causer des dommages irréparables à une batterie.
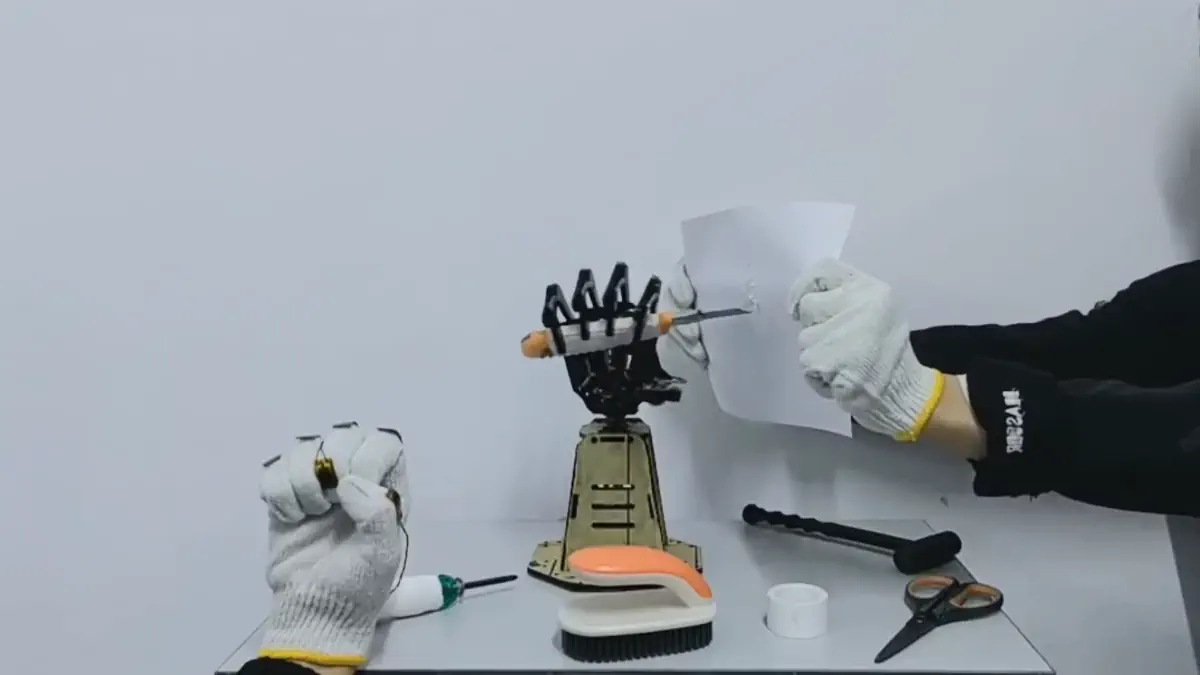
De plus, les capteurs peuvent identifier la forme des objets ou aider les systèmes robotiques à saisir des objets fragiles. Lorsqu’ils sont utilisés avec un manipulateur robotique comme une main ou un étau, les capteurs peuvent surveiller la pression en temps réel et la comparer à des seuils de sécurité prédéfinis pour éviter les dommages aux objets. Ce système de retour de force permet au robot de suivre avec précision les mouvements de la main et de saisir des objets délicats comme le tofu, le coton et les brioches cuites à la vapeur, ce qui pourrait constituer un grand pas en avant dans l’interaction et l’interface homme-machine efficaces.
Q : Quelles sont les prochaines étapes de ce travail ? Y a-t-il des plans de commercialisation à l’avenir ?
Cheng : Nous prévoyons de réduire la taille et le poids du capteur pour améliorer la biocompatibilité et la stabilité dans des environnements complexes. Des recherches supplémentaires pourraient permettre une sensibilité spatialement programmable — permettant à un seul capteur ou réseau de détecter simultanément des pressions subtiles dans une région et de résister à de grandes charges dans une autre — tout en intégrant la détection de pression, de température ou de déformation dans une structure unique et complète.
Nous croyons que ces capteurs ont un fort potentiel de déploiement futur dans le monde réel et de commercialisation grâce à l’intégration avec des dispositifs portables et des robots commerciaux. Des réseaux de ces capteurs pourraient offrir une solution de détection peu coûteuse et performante, tout en restant hautement flexibles et personnalisables.
Article : Graphene Aerogel-Based Flexible Pressure Sensor for Physiological Signal Detection and Human–Machine Interaction – Journal : Nano-Micro Letters – Méthode : Experimental study – DOI : Lien vers l’étude
Source : Penn State
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.