Les chercheurs du MIT ont développé un capteur tactile en forme de doigt humain pour les robots, permettant une meilleure dextérité et une plus grande variété de prises. Ce capteur, appelé GelSight Svelte, pourrait ouvrir de nouvelles possibilités pour les tâches de manipulation robotique.
Un capteur tactile inspiré du doigt humain
Les capteurs tactiles actuels utilisés dans les mains robotiques sont souvent petits et plats, se limitant aux extrémités des doigts. Cela restreint les types de prises et de manipulations qu’ils peuvent effectuer. Le capteur GelSight Svelte, développé par les chercheurs du MIT, est long, courbé et conçu pour ressembler à un doigt humain. Il offre une détection tactile haute résolution sur une grande surface.
Le capteur utilise deux miroirs pour réfléchir et réfracter la lumière, permettant à une seule caméra située à la base du capteur de voir le long de toute la longueur du doigt. De plus, le capteur est doté d’une structure flexible qui permet d’estimer la force appliquée sur le capteur en mesurant la flexion de la structure lorsqu’elle touche un objet.

Une main robotique plus polyvalente
Les chercheurs ont utilisé des capteurs GelSight Svelte pour créer une main robotique capable de saisir des objets lourds de manière similaire à un humain, en utilisant toute la surface de détection de ses trois doigts. La main peut également effectuer les mêmes prises en pince que les pinces robotiques traditionnelles.
Alan (Jialiang) Zhao, étudiant en génie mécanique et auteur principal de l’article sur GelSight Svelte, explique : «Parce que notre nouveau capteur a la forme d’un doigt humain, nous pouvons l’utiliser pour effectuer différents types de prises pour différentes tâches, au lieu d’utiliser des prises en pince pour tout. Il y a seulement tant de choses que vous pouvez faire avec une pince à mâchoires parallèles. Notre capteur ouvre vraiment de nouvelles possibilités sur les différentes tâches de manipulation que nous pourrions faire avec des robots.»
Prochaines étapes
«Les capteurs optiques-tactiles pour doigts permettent aux robots d’utiliser des caméras peu coûteuses pour collecter des images haute résolution du contact avec une surface, et en observant la déformation d’une surface flexible, le robot estime la forme du contact et les forces appliquées. Ce travail représente une avancée dans la conception du doigt GelSight, avec des améliorations dans la couverture complète du doigt et la capacité d’approximer les couples de déviation de flexion en utilisant les différences d’image et l’apprentissage automatique», commente Monroe Kennedy III, professeur adjoint d’ingénierie mécanique à l’université de Stanford, qui n’a pas été impliqué dans cette recherche.
«Améliorer le sens du toucher d’un robot pour qu’il se rapproche de la capacité humaine est une nécessité et peut-être le problème catalyseur pour développer des robots capables d’effectuer des tâches complexes et dextres».
À l’avenir, les chercheurs prévoient d’améliorer le capteur GelSight Svelte pour qu’il soit articulé et puisse se plier au niveau des articulations, comme un doigt humain. Cela permettrait d’augmenter encore la dextérité et la polyvalence des robots équipés de ce capteur.
En synthèse
Le capteur GelSight Svelte, développé par des chercheurs du MIT, est un capteur tactile en forme de doigt humain qui permet aux robots d’effectuer des prises et des manipulations plus complexes. En utilisant une caméra et des miroirs pour obtenir des informations tactiles haute résolution, ce capteur pourrait révolutionner la manière dont les robots interagissent avec leur environnement et effectuent des tâches de manipulation. Les améliorations futures pourraient inclure l’ajout d’articulations pour une dextérité encore plus grande.
Pour une meilleure compréhension
1. Qu’est-ce que le capteur GelSight Svelte ?
Le GelSight Svelte est un capteur tactile en forme de doigt humain développé par des chercheurs du MIT. Il permet aux robots d’effectuer des prises et des manipulations plus complexes grâce à une détection tactile haute résolution sur une grande surface.
2. Comment fonctionne le capteur GelSight Svelte ?
Le capteur utilise deux miroirs pour réfléchir et réfracter la lumière, permettant à une seule caméra située à la base du capteur de voir le long de toute la longueur du doigt. Il est également doté d’une structure flexible qui permet d’estimer la force appliquée sur le capteur en mesurant la flexion de la structure lorsqu’elle touche un objet.
3. Quels types de prises peut effectuer cette main robotique ?
Une main robotique équipée de capteurs GelSight Svelte peut effectuer des prises en pince, des prises latérales en pince et des prises de force en utilisant toute la surface de détection de ses trois doigts. Cela permet une plus grande polyvalence et une meilleure dextérité pour les robots.
4. Quelles sont les améliorations prévues pour ce capteur ?
Les chercheurs prévoient d’améliorer le capteur GelSight Svelte pour qu’il soit articulé et puisse se plier au niveau des articulations, comme un doigt humain. Cela permettrait d’augmenter encore la dextérité et la polyvalence des robots équipés de ce capteur.
5. Quel est l’objectif de l’utilisation du capteur GelSight Svelte dans les robots ?
L’objectif est d’améliorer la capacité des robots à effectuer des tâches complexes et délicates en leur permettant d’interagir avec leur environnement de manière plus similaire à celle des humains, grâce à une meilleure dextérité et à une plus grande variété de prises possibles.
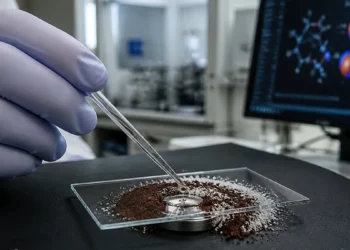
Légende illustration principale : Des chercheurs du MIT ont mis au point un capteur tactile à base de caméra, long, incurvé et ayant la forme d’un doigt humain. Leur dispositif, qui offre une détection tactile à haute résolution sur une grande surface, pourrait permettre à une main robotisée d’effectuer plusieurs types de saisies. Crédit Image : MIT
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.