Des chercheurs de l’université d’État de Caroline du Nord ont mis au point un dispositif de préhension robotisé remarquablement polyvalent. Avec la douceur nécessaire pour attraper une goutte d’eau et la force pour soulever un poids de 6,4 kilogrammes, ce dispositif fait preuve d’une incroyable finesse et précision.
Ce dispositif de préhension, d’un genre nouveau, est capable de manier des objets ultra-mous, ultra-minces, mais aussi de poids conséquents. Il présente donc une réelle polyvalence, au carrefour entre la douceur, la précision et la force.
L’aspect novateur réside aussi dans son intégration à une technologie permettant de le contrôler par les signaux électriques produits par les muscles de l’avant-bras, ouvrant ainsi la voie à des applications dans le domaine des prothèses robotiques.
Une conception inspirée de l’art du kirigami
« Il est difficile de mettre au point une seule pince souple capable de manipuler des objets ultra-mous, ultra-fins et lourds, en raison des compromis entre la force, la précision et la douceur« , explique Jie Yin, professeur agrégé de génie mécanique et aérospatial à l’université d’État de Caroline du Nord. « Notre conception permet d’obtenir un excellent équilibre entre ces caractéristiques« .
La conception de ces nouveaux préhenseurs s’appuie sur une précédente génération de préhenseurs robotiques souples, inspirés de l’art du kirigami. Le kirigami consiste à découper et plier des feuilles de matériaux bidimensionnels pour former des formes tridimensionnelles.
Les préhenseurs actuels utilisent également le kirigami, mais leur conception est substantiellement différente et améliorée grâce aux enseignements tirés de la génération précédente.
Une force et une douceur résultant d’une distribution optimale
La nouvelle conception est capable d’atteindre des niveaux élevés de résistance et de douceur grâce à la façon dont elle distribue la force dans toute la structure de la pince.
« La force des préhenseurs robotisés est généralement mesurée en fonction du rapport entre la charge utile et le poids« , explique M. Yin. « Nos pinces pèsent 0,4 gramme et peuvent soulever jusqu’à 6,4 kilogrammes. Cela représente un rapport charge/poids d’environ 16 000. C’est 2,5 fois plus que le précédent record de rapport charge/poids, qui était de 6 400. Combinée à ses caractéristiques de douceur et de précision, la force des pinces laisse entrevoir une grande variété d’applications. »
De plus, les caractéristiques attractives de cette nouvelle technologie sont principalement générées par sa conception structurelle, plutôt que par les matériaux utilisés pour fabriquer les préhenseurs. Cela signifie que les préhenseurs pourraient être fabriqués à partir de matériaux biodégradables, ce qui serait particulièrement utile pour des applications nécessitant une utilisation limitée dans le temps.
Une intégration réussie avec une main prothétique myoélectrique
Les chercheurs ont réussi à intégrer le dispositif de préhension à une main prothétique myo-électrique, c’est-à-dire contrôlée par l’activité musculaire. Ce préhenseur robotisé améliore la réalisation de tâches qui sont difficiles à effectuer avec les dispositifs prothétiques existants.
Cependant, ce nouveau préhenseur ne peut pas remplacer toutes les fonctions des mains prothétiques existantes, mais il pourrait être utilisé pour compléter ces autres fonctions.
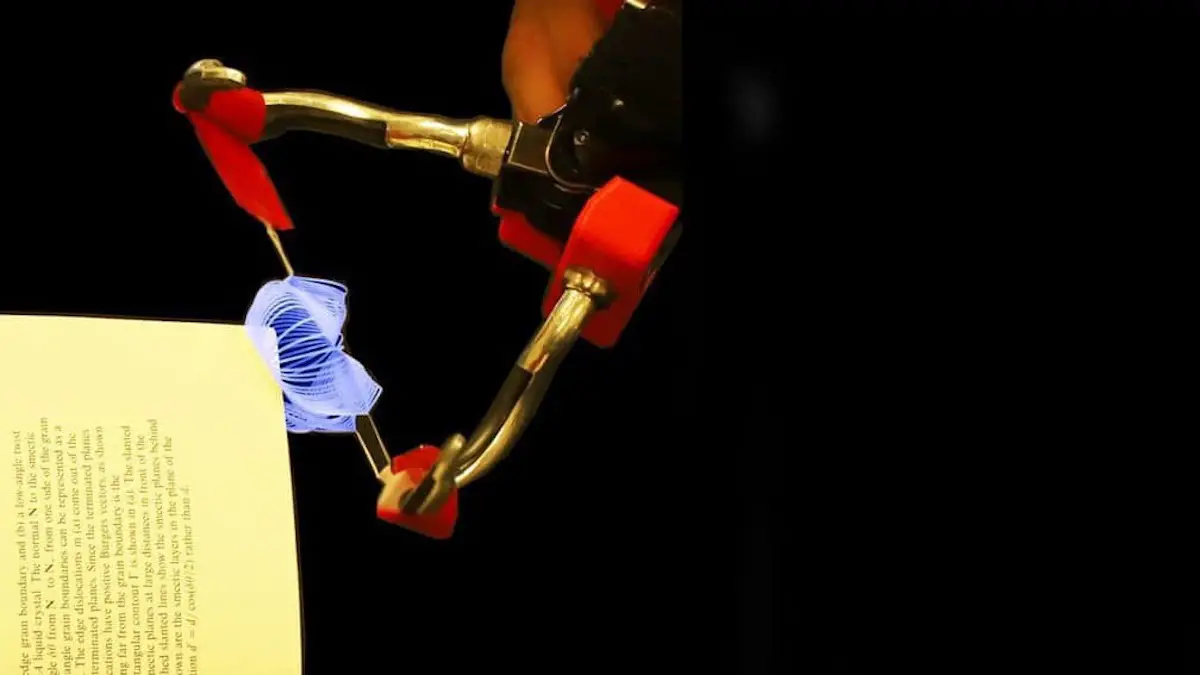
Lors des essais de validation du concept, les chercheurs ont démontré que les pinces en kirigami pouvaient être utilisées conjointement avec la prothèse myoélectrique pour tourner les pages d’un livre et arracher des raisins d’une vigne.
« Nous pensons que la conception de la pince a des applications potentielles dans des domaines allant de la prothèse robotique et de la transformation alimentaire à la fabrication de produits pharmaceutiques et électroniques« , conclut M. Yin. « Nous sommes impatients de travailler avec des partenaires industriels pour trouver des moyens d’utiliser cette technologie.«
En synthèse
En résumé, ce nouveau design de préhenseur robotisé, avec sa polyvalence impressionnante et sa douceur délicate, suggère une multitude d’applications potentielles. De la production alimentaire aux prothèses robotiques, en passant par la fabrication de produits pharmaceutiques et électroniques, cette technologie pourrait révolutionner de nombreux secteurs.
Pour une meilleure compréhension
1. Qu’est-ce que le kirigami ? « Le kirigami est un art qui consiste à découper et à plier des feuilles de matériaux bidimensionnels pour former des formes tridimensionnelles. »
2. Comment fonctionne le préhenseur robotisé ? « Le préhenseur robotisé utilise l’art du kirigami pour se plier et se déplier, lui permettant d’attraper délicatement divers objets avec force et précision. »
3. Pourquoi ce nouveau préhenseur est-il innovant ? « Sa conception unique lui permet de distribuer la force à travers sa structure, lui conférant une grande force et une grande douceur. De plus, il peut être contrôlé par les signaux électriques produits par les muscles, ce qui est utile pour les prothèses robotiques. »
L’article, intitulé « Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision » – « Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision » est publié en libre accès dans la revue Nature Communications. L’article a été cosigné par Yao Zhao et Yanbin Li, chercheurs postdoctoraux à NC State, Joseph Berman, étudiant en doctorat à NC State, et Yinding Chi, ancien étudiant en doctorat à NC State. DOI: https://doi.org/10.1038/s41467-023-39741-6