Les robots mobiles doivent estimer en continu leur position pour naviguer de manière autonome. Cependant, les systèmes de navigation par satellite ne sont pas toujours fiables : les signaux peuvent se dégrader près des bâtiments ou devenir indisponibles à l’intérieur. Pour fonctionner en toute sécurité et efficacement, les robots doivent interpréter leur environnement à l’aide de capteurs embarqués et d’algorithmes de localisation robustes.
Des chercheurs de l’Université Miguel Hernández d’Elche (UMH) en Espagne ont développé un système de localisation hiérarchique qui améliore significativement le positionnement des robots dans de grands environnements changeants. La méthode s’attaque à l’un des problèmes les plus difficiles en robotique mobile : le problème dit du « robot kidnappé », dans lequel un robot perd la connaissance de sa pose initiale après avoir été déplacé, éteint ou délogé.
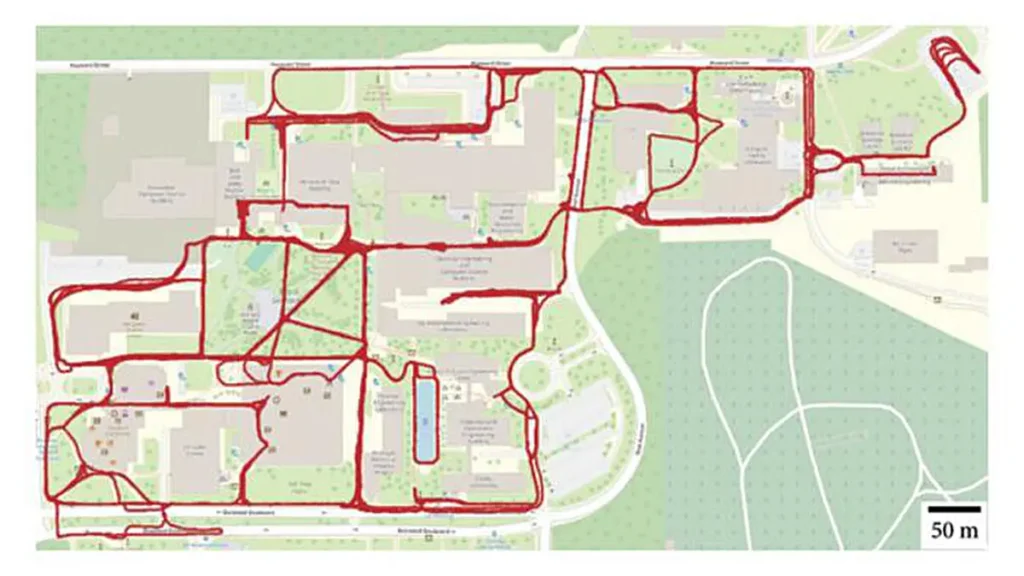
L’étude, publiée dans le International Journal of Intelligent Systems, présente MCL-DLF (Monte Carlo Localization – Deep Local Feature), un cadre de localisation 3D LiDAR grossier à fin conçu pour la navigation à long terme dans de grands environnements. Le système a été validé pendant plusieurs mois sur le campus de l’UMH à Elche dans des conditions environnementales variées, incluant des scénarios intérieurs et extérieurs.
Une stratégie hiérarchique inspirée de l’orientation humaine
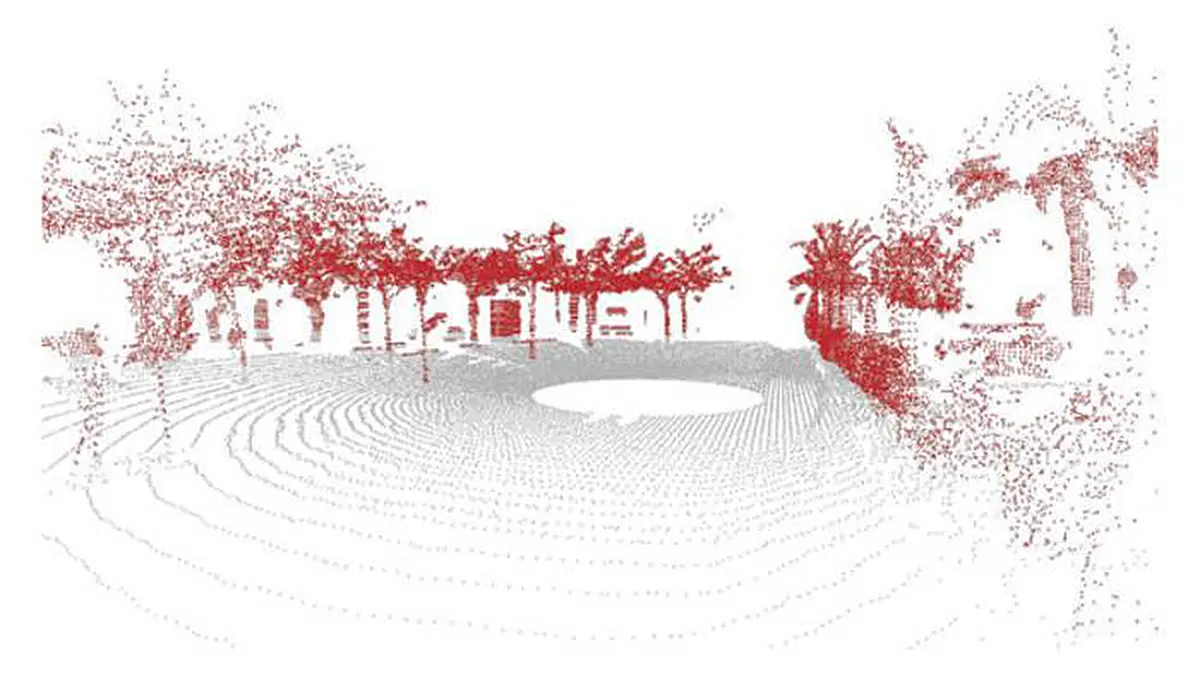
L’approche proposée imite la façon dont les humains s’orientent dans des environnements inconnus ou changeants. D’abord, le robot effectue une étape de localisation grossière, identifiant sa région approximative en se basant sur des caractéristiques structurelles globales extraites des nuages de points 3D LiDAR, comme les bâtiments ou la végétation.
Une fois cette région délimitée, le système effectue une localisation fine, analysant des caractéristiques locales détaillées pour estimer la position et l’orientation exactes du robot.
« C’est similaire à la façon dont les gens reconnaissent d’abord une zone générale, puis s’appuient sur de petits détails distinctifs pour déterminer leur position précise », explique Míriam Máximo, chercheuse à l’UMH et auteure principale de l’étude. Le travail a été dirigé par Mónica Ballesta et David Valiente, également chercheurs à l’Institut de recherche en ingénierie d’Elche (I3E) de l’UMH.Pour éviter l’ambiguïté dans des environnements visuellement similaires, la méthode intègre des techniques d’apprentissage profond qui extraient automatiquement des caractéristiques locales discriminantes à partir des nuages de points 3D.

Plutôt que de s’appuyer sur des règles prédéfinies, le robot apprend quelles caractéristiques environnementales sont les plus informatives pour la localisation. Ces caractéristiques apprises sont combinées avec la localisation probabiliste de Monte Carlo, qui maintient plusieurs hypothèses de pose et les met à jour à mesure que de nouvelles données de capteurs sont reçues.
Robuste face à la variabilité environnementale
Un défi majeur dans la navigation robotique à long terme est la variabilité environnementale. Les espaces extérieurs changent au fil du temps en raison des changements saisonniers, de la croissance de la végétation ou des différences d’éclairage, ce qui peut modifier considérablement l’apparence.
Les chercheurs rapportent que MCL-DLF atteint une précision de position plus élevée que les approches conventionnelles tout en maintenant une robustesse accrue face aux changements saisonniers. Le système est capable de localiser un robot sans connaissance initiale de sa pose, même après des mois de changements environnementaux, ce qui le rend particulièrement adapté aux applications de navigation autonome à long terme.
Article : A Coarse-to-Fine 3D LiDAR Localization With Deep Local Features for Long-Term Robot Navigation in Large Environments – Journal : International Journal of Intelligent Systems – Méthode : Experimental study – DOI : Lien vers l’étude
Source : Universidad Miguel Hernandez de Elche
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.