Anne J. Manning
Les robots souples fabriqués à partir de matériaux flexibles et biocompatibles sont très demandés dans des secteurs allant de la santé à la fabrication, mais la conception précise et le contrôle de ces robots pour des usages spécifiques restent un défi de taille. Et si vous pouviez imprimer en 3D un robot souple avec des capacités de changement de forme prévisibles déjà intégrées ?
Les experts en impression 3D d’Harvard ont montré que c’était possible. Une étude dans Advanced Materials décrit une nouvelle méthode de fabrication pour imprimer des dispositifs robotiques comportant de longs filaments avec des canaux creux positionnés avec précision. Lorsqu’ils sont remplis d’air, ces canaux permettent au dispositif de se plier et de se déformer de manière prédéterminée.
Cette avancée a été menée par l’étudiant diplômé Jackson Wilt et l’ancienne chercheuse postdoctorale Natalie Larson dans le laboratoire de Jennifer Lewis, la professeure Hansjorg Wyss d’ingénierie inspirée de la biologie à la John A. Paulson School of Engineering and Applied Sciences (SEAS). La méthode combine plusieurs techniques d’impression 3D développées à Harvard et contourne les moules traditionnels typiquement utilisés pour fabriquer des robots souples.
« Nous utilisons deux matériaux à partir d’une seule sortie, qui peut être tournée pour programmer la direction dans laquelle le robot se plie lorsqu’il est gonflé », explique Wilt. « Nos objectifs sont alignés sur la création de robots souples et bio-inspirés pour diverses applications. »
Impression 3D multimatériau rotative
La nouvelle approche s’appuie sur une innovation du laboratoire Lewis appelée impression 3D multimatériau rotative, dans laquelle une seule buse permet d’imprimer simultanément plus d’un matériau. Pendant que la machine tourne et se réoriente, elle extrude de l’encre selon des motifs personnalisables. Le laboratoire a utilisé ce type d’impression 3D pour fabriquer des structures hélicoïdales souples qui agissent comme des muscles artificiels et d’autres objets.
En utilisant cette approche générale, les chercheurs ont créé des filaments constitués d’une coque extérieure en polyuréthane et d’un canal intérieur fait d’un polymère couramment présent dans les gels capillaires, appelé poloxamère. Les filaments pouvaient être disposés en lignes, et en motifs à plat et en relief. Grâce à un contrôle précis de la conception de la buse de l’imprimante, de sa vitesse de rotation et de son débit de matière, les chercheurs ont programmé l’orientation, la forme et la taille de chaque canal intérieur.
Une fois la coque extérieure solidifiée, les chercheurs ont ensuite lavé le canal intérieur semblable à du gel capillaire. Le résultat : des structures tubulaires avec des canaux creux qui peuvent être pressurisés pour se plier dans différentes directions et former la base de dispositifs souples qui se dilatent, se contractent et saisissent.
Fabrication simple, dispositifs complexes
La recherche ouvre de nouvelles portes vers une fabrication simple de dispositifs complexes. Elle offre une alternative aux méthodes conventionnelles de fabrication de robots souples, qui impliquent généralement de couler un matériau souple dans un moule, de structurer des canaux pneumatiques à la surface et d’encapsuler les canaux dans une autre couche. « Dans ce travail, nous n’avons pas de moule. Nous imprimons les structures, nous les programmons rapidement, et nous pouvons personnaliser rapidement l’actionnement », souligne Wilt.
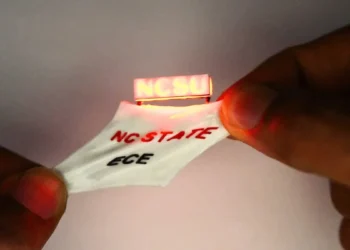
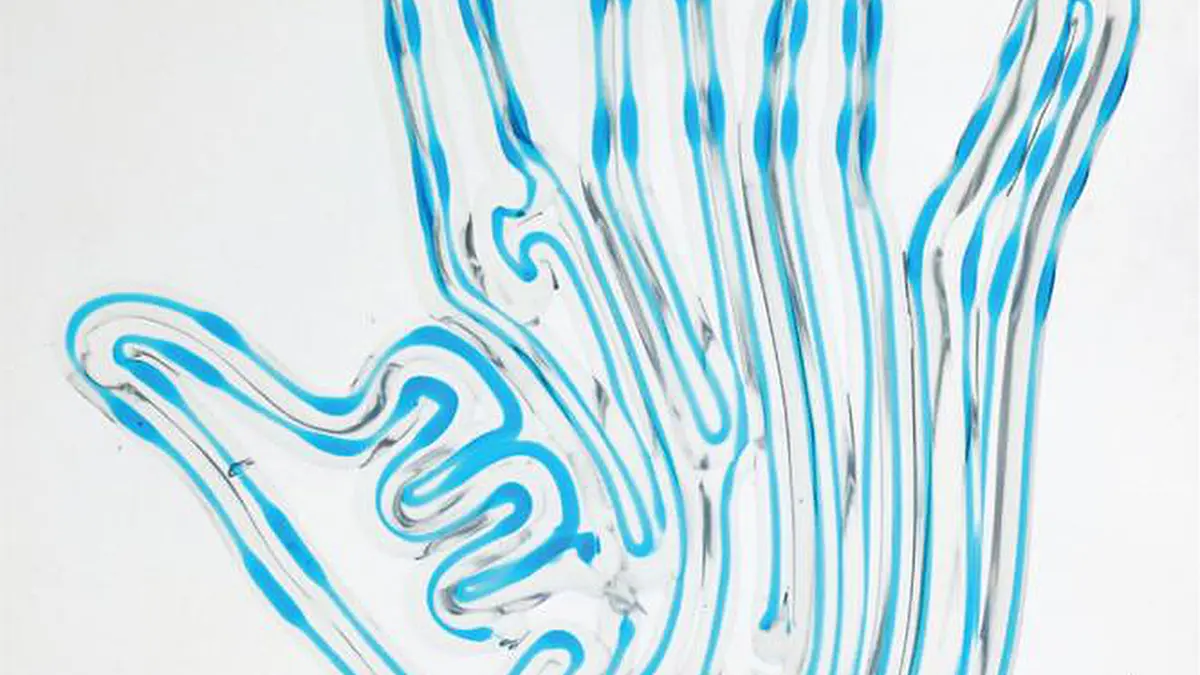
Ils ont démontré leur nouvelle technique en imprimant en spirale un motif floral d’un seul tracé continu en forme de labyrinthe. Ils ont également imprimé une poignée à cinq doigts complète avec des « articulations » qui se plient. Leurs résultats illustrent le potentiel de cette fabrication rapide pour des applications allant de la robotique chirurgicale aux dispositifs d’assistance pour les humains, selon Wilt.
Article : Rotational Multimaterial 3D Printing of Soft Robotic Matter With Embedded Asymmetrical Pneumatics – Journal : Advanced Materials – Méthode : Experimental study – DOI : Lien vers l’étude
Source : Harvard U.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.