L’avenir des prothèses de main pourrait être révolutionné par une nouvelle recherche de l’Université Technique de Munich (TUM). En utilisant l’intelligence artificielle et une compréhension plus approfondie de l’activité musculaire, les chercheurs ont développé une méthode pour contrôler de manière plus intuitive et naturelle les membres artificiels.
Le principe de synergie est au cœur de cette recherche. Selon la professeure Cristina Piazza, spécialiste en rééducation et robotique assistive à la TUM, le cerveau active un ensemble de cellules musculaires lors de l’utilisation de nos mains. Ce processus est maintenant utilisé pour concevoir et contrôler les mains artificielles.
Les chercheurs ont développé de nouveaux algorithmes d’apprentissage pour rendre les mouvements plus fluides et naturels. Par exemple, lorsqu’un patient utilise une main artificielle pour saisir un stylo, plusieurs étapes se produisent. Le patient oriente d’abord la main artificielle vers l’emplacement de préhension, rapproche lentement les doigts, puis saisit le stylo.
L’objectif est de rendre ces mouvements de plus en plus fluides, de sorte qu’il est à peine perceptible que de nombreux mouvements distincts composent un processus global.
Découverte de modèles à partir de 128 canaux de signal
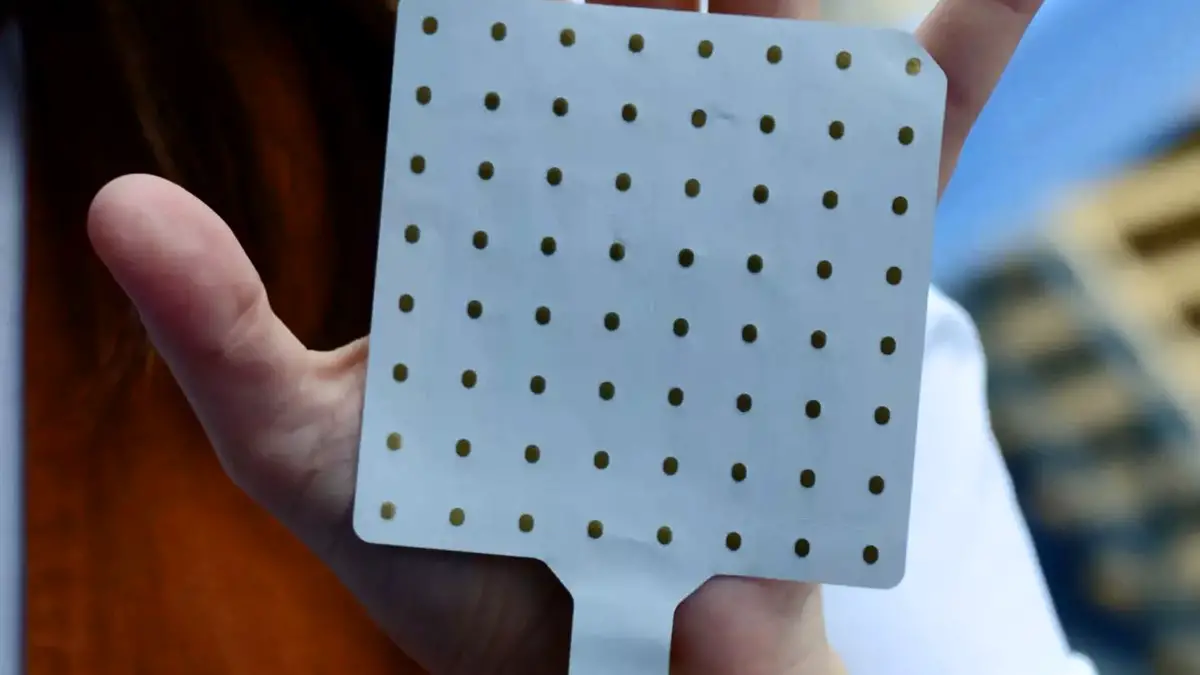
Les chercheurs ont utilisé un réseau de 128 capteurs sur l’avant-bras pour détecter l’activation musculaire. Cette méthode estime également quels signaux électriques les neurones moteurs spinaux ont transmis.
« Plus nous utilisons de capteurs, mieux nous pouvons enregistrer des informations provenant de différents groupes musculaires et découvrir quelles activations musculaires sont responsables de quels mouvements de la main », explique la professeure Piazza.
Défis actuels du contrôle avancé des mains artificielles
Il reste encore quelques défis à relever : L’algorithme d’apprentissage, qui est basé sur les informations fournies par les capteurs, doit être réappris chaque fois que le film glisse ou est retiré. En outre, les capteurs doivent être préparés avec un gel afin de garantir la conductivité nécessaire à l’enregistrement précis des signaux provenant des muscles.
« Nous utilisons des techniques de traitement des signaux pour filtrer le bruit et obtenir des signaux utilisables », précise le Dr Capsi Morales. « Chaque fois qu’un nouveau patient porte le brassard muni de nombreux capteurs sur son avant-bras, l’algorithme doit d’abord identifier les schémas d’activation pour chaque séquence de mouvement afin de détecter ultérieurement l’intention de l’utilisateur et de la traduire en commandes pour la main artificielle. »
En synthèse
La recherche actuelle sur le contrôle des prothèses de main est en train de faire un pas en avant significatif grâce à l’utilisation de l’intelligence artificielle et d’une meilleure compréhension de l’activité musculaire. Bien qu’il reste encore des défis à relever, cette nouvelle approche pourrait permettre un contrôle plus naturel et intuitif des membres artificiels à l’avenir.
Pour une meilleure compréhension
Qu’est-ce que le principe de synergie ?
Le principe de synergie fait référence à la façon dont le cerveau active un ensemble de cellules musculaires lors de l’utilisation de nos mains.
Comment l’intelligence artificielle est-elle utilisée dans cette recherche ?
L’intelligence artificielle est utilisée pour développer de nouveaux algorithmes d’apprentissage qui rendent les mouvements de la main artificielle plus fluides et naturels.
Quels sont les défis actuels du contrôle avancé des mains artificielle ?
Les défis actuels comprennent la nécessité de ré-entrainer l’algorithme d’apprentissage chaque fois que le film de capteurs glisse ou est retiré, et la nécessité de préparer les capteurs avec un gel pour garantir la conductivité nécessaire pour enregistrer précisément les signaux provenant des muscles.
Références
Légende illustration principale : Une prothèse de main s’agrippe à l’aide de signaux musculaires. (Image : TUM)
La recherche a été présentée à la conférence internationale de l’IEEE sur la robotique de réadaptation 2023 – « Exploring Muscle Synergies for Performance Enhancement and Learning in Myoelectric Control Maps. DOI:10.1109/ICORR58425.2023.10304809
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.