
Pour la première fois, des chercheurs du Laboratoire de Robotique Chirurgicale de l’Université de Twente ont réussi à faire travailler ensemble deux microrobots pour saisir, déplacer et assembler des objets passifs dans des environnements 3D. Cette réalisation ouvre de nouveaux horizons pour des applications biomédicales prometteuses.
Imaginez que vous ayez besoin d’une intervention chirurgicale quelque part à l’intérieur de votre corps. La partie qui nécessite toutefois une intervention est très difficile à atteindre pour un chirurgien.
À l’avenir, une paire de robots plus petits qu’un grain de sel pourrait entrer dans votre corps et effectuer l’opération.
Ces microrobots pourraient travailler ensemble pour effectuer toutes sortes de tâches complexes. « C’est presque comme de la magie », indique Franco Piñan Basualdo, auteur correspondant de la publication.
Des microrobots magnétiques pour des opérations complexes
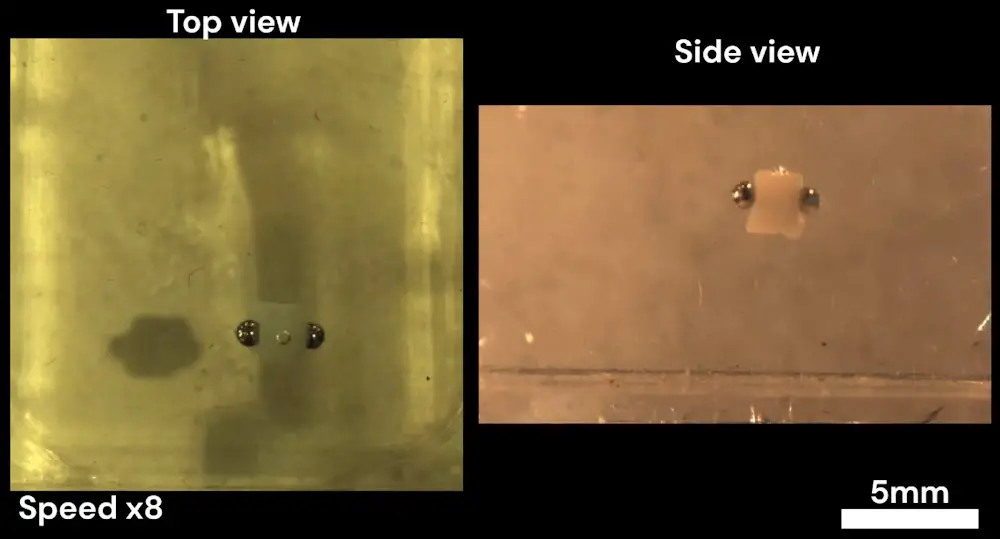
Les chercheurs de l’Université de Twente ont réussi à exploiter deux de ces microrobots magnétiques de la taille d’un millimètre pour effectuer plusieurs opérations. Comme une horlogerie, les microrobots ont pu saisir, déplacer et assembler des cubes. Ce qui est unique dans cette réalisation, c’est l’environnement 3D dans lequel les robots ont effectué leurs tâches. Réaliser cela a été un véritable défi.
Tout comme les aimants ordinaires se collent ensemble lorsqu’ils se rapprochent trop, ces minuscules robots magnétiques ont un comportement similaire. Cela signifie qu’ils ont une limite à la proximité qu’ils peuvent obtenir avant de commencer à se coller ensemble. Mais les chercheurs du Laboratoire de Robotique Chirurgicale ont trouvé un moyen d’utiliser cette attraction naturelle à leur avantage. Avec un contrôleur sur mesure, l’équipe a pu déplacer les robots individuels, mais aussi comment ils interagissaient entre eux.
Des applications prometteuses en biomédecine
Les microrobots sont biocompatibles et peuvent être contrôlés dans des environnements difficiles à atteindre et même fermés. Cela en fait une promesse pour les études et applications biomédicales.
« Nous pouvons manipuler à distance des échantillons biomédicaux sans les contaminer. Cela pourrait améliorer les procédures existantes et ouvrir la porte à de nouvelles », précise Piñan Basualdo.
En synthèse
Dr. Franco Piñan Basualdo est un chercheur postdoctoral au Laboratoire de Robotique Chirurgicale. Ses intérêts de recherche comprennent la micro-robotique, le contrôle sans contact, la robotique en essaim, la matière active, la microfluidique et les phénomènes interfaciaux. Cette recherche a été réalisée au Laboratoire de Robotique Chirurgicale.
Le Prof. Sarthak Misra, responsable du laboratoire, se concentre sur le développement de solutions innovantes pour un large éventail de défis cliniquement pertinents, dont l’imagerie biomédicale, l’automatisation des procédures médicales et le développement d’outils micro-robotiques.
La recherche a été réalisée dans le cadre du projet européen RĔGO (programme Horizon Europe), qui vise à développer un ensemble innovant de robots en essaim, de taille micro, sans fil, réactifs aux stimuli et alimentés par l’IA.
Pour une meilleure compréhension
Qu’est-ce que les microrobots?
Les microrobots sont des robots de très petite taille, souvent de l’ordre du millimètre. Ils sont généralement utilisés pour des tâches précises et délicates, comme des interventions chirurgicales dans des zones difficiles à atteindre.
Quelle est la nouveauté de cette recherche?
Pour la première fois, des chercheurs ont réussi à faire travailler ensemble deux microrobots pour saisir, déplacer et assembler des objets dans un environnement 3D. C’est une étape importante dans le développement de la micro-robotique.
Comment les microrobots sont-ils contrôlés?
Les microrobots sont contrôlés à distance à l’aide d’un contrôleur sur mesure. Ce contrôleur permet non seulement de déplacer les robots individuellement, mais aussi de contrôler leur interaction.
Quelles sont les applications potentielles de cette technologie?
Les microrobots ont un potentiel énorme dans le domaine biomédical. Ils pourraient être utilisés pour manipuler des échantillons biomédicaux sans les contaminer, améliorant ainsi les procédures existantes et ouvrant la porte à de nouvelles applications.
Qui sont les chercheurs derrière cette découverte?
Cette recherche a été réalisée par le Dr. Franco Piñan Basualdo et son équipe au Laboratoire de Robotique Chirurgicale de l’Université de Twente.
Leurs résultats ont été publiés dans un article, intitulé ‘Collaborative Magnetic Agents for 3D Microrobotic Grasping’, dans la revue scientifique Advanced Intelligent Systems. DOI: https://doi.org/10.1002/aisy.202300365















