Des scientifiques ont mis au point un robot souple inspiré de la raie manta qui utilise des champs magnétiques pour se déplacer et recharger sa source d’alimentation embarquée, ce qui lui permet d’effectuer des détections autonomes et de prendre des décisions sous l’eau.
Les robots souples sont appréciés pour leur agilité et leur toucher délicat, ce qui les rend idéaux pour traverser des espaces fragiles ou confinés afin d’effectuer diverses tâches, allant de la culture de bébés coraux en laboratoire à l’inspection de conduites industrielles dans les usines chimiques. Cependant, réaliser une intelligence incarnée dans de tels systèmes, où la détection, le mouvement et l’alimentation électrique fonctionnent ensemble dans une configuration sans fil, reste un défi. Les matériaux flexibles peuvent se déformer et s’adapter, mais leurs sources d’alimentation ne le peuvent pas. Les batteries conventionnelles raidissent souvent le corps du robot, s’épuisent rapidement ou se dégradent sous la contrainte, ce qui laisse les robots souples soit attachés, soit avec une courte durée de vie.
Le professeur assistant Wu Changsheng et son équipe du Département de science et génie des matériaux et du Département de génie électrique et informatique, au Collège de Design et d’Ingénierie de l’Université Nationale de Singapour, ont trouvé un moyen de transformer cette limitation en avantage. Leur étude démontre que les mêmes champs magnétiques utilisés pour contrôler les robots souples peuvent également améliorer la performance des batteries qu’ils contiennent.
« Les champs magnétiques sont typiquement utilisés pour stimuler le mouvement des robots souples, dans un processus appelé ‘actionnement’, mais nous avons réalisé qu’ils pouvaient aussi stabiliser les réactions électrochimiques à l’intérieur des batteries flexibles, a expliqué le Pr. assistant Wu. Permettre à l’actionnement et à la gestion de l’énergie de partager le même principe physique nous permet de rendre le robot véritablement autonome et efficace. »
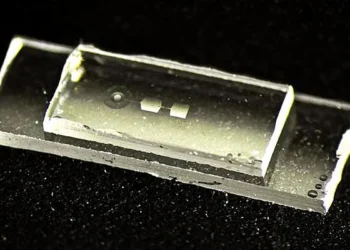
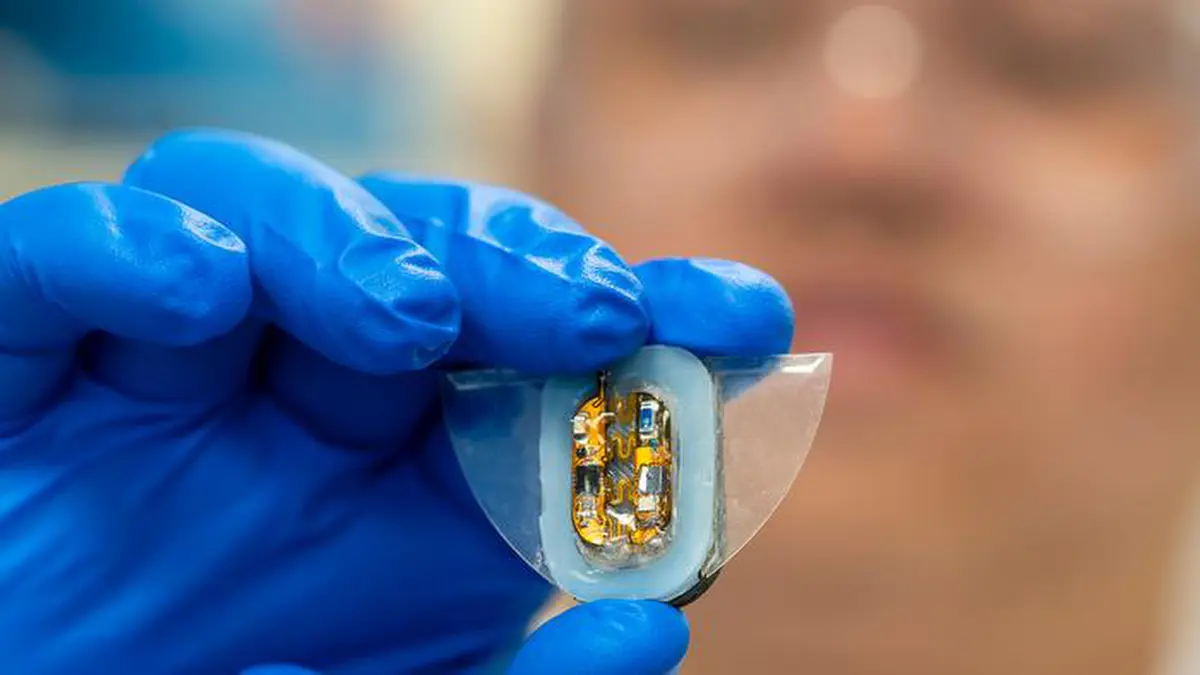
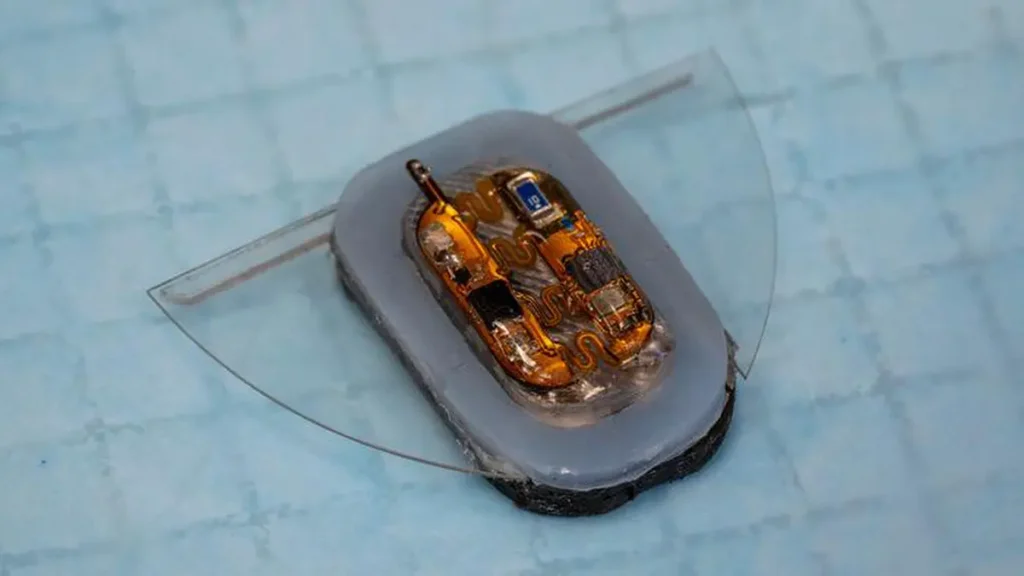
L’équipe a conçu des batteries flexibles zinc-dioxyde de manganèse (Zn-MnO₂) encapsulées dans du silicone souple et empilées verticalement à l’intérieur d’un corps de robot inspiré par la raie manta. Fait important, contrairement aux agencements latéraux traditionnels, cette intégration verticale maximise l’espace et maintient la souplesse du robot.
« Nous nous sommes inspirés de la raie manta parce que son corps incarne exactement ce que nous voulons réaliser — une intégration naturelle entre le mouvement, la détection et l’utilisation de l’énergie, a déclaré le Pr. assistant Wu. Sa forme permet une coordination synergique des multifonctionnalités de manière efficace et compacte, ce qui en fait un modèle biologique parfait pour l’intelligence incarnée. »
À travers des tests, les chercheurs ont révélé que le champ magnétique produit par les actionneurs ferromagnétiques du robot stabilisait la chimie interne des batteries flexibles, réduisant le risque de croissance dendritique, des dépôts métalliques en forme d’aiguilles qui peuvent causer des courts-circuits et maintenant la production d’énergie sous des contraintes et des flexions répétées. Sous l’amélioration magnétique, les batteries ont conservé 57,3 % de leur capacité après 200 cycles, presque le double de celle des échantillons non améliorés.
« Après une investigation plus poussée, nous avons découvert comment cette amélioration fonctionne. La force de Lorentz générée par le champ magnétique agit sur les ions en mouvement dans l’électrolyte et redirige les trajectoires des ions zinc pendant le placage, créant un flux ionique plus uniforme qui favorise un dépôt de zinc régulier à l’anode et supprime efficacement la croissance dendritique. Simultanément, le champ magnétique a aligné les spins des électrons dans le réseau d’oxyde de manganèse, renforçant les liaisons atomiques et empêchant la dégradation des cristaux pendant la charge et la décharge, a ajouté Xiao Xiao, un étudiant en doctorat dans l’équipe du Dr. Wu et co-premier auteur de la publication. Cette double stabilisation magnéto-électrochimique, réalisée dans un format entièrement flexible, est une étape passionnante vers des systèmes d’alimentation embarqués durables pour les robots souples opérant dans des environnements dynamiques et exigeants. »
L’intelligence incarnée en action
Pour démontrer le concept, l’équipe a construit un robot raie manta actionné magnétiquement, équipé des batteries flexibles, d’actionneurs en élastomère magnétique souple et d’un circuit hybride léger pour la détection et la communication sans fil. Les nageoires du robot battent en réponse aux champs magnétiques externes générés par une bobine ou un réseau d’électroaimants, lui permettant de stabiliser sa locomotion et de s’adapter à différentes surfaces d’eau.
Comme prévu, les mêmes champs magnétiques qui propulsent et dirigent le robot améliorent également sa stabilité énergétique confirmant la vision des chercheurs de fusionner le contrôle du mouvement avec la gestion de l’énergie. Le robot peut effectuer des manœuvres de nage de base, telles que la propulsion linéaire, des virages à 90 degrés et des trajectoires complexes, tout en transmettant des données en temps réel à un ordinateur qui visualise ses mouvements dans un environnement de jumeau numérique.
Dans cette configuration, le robot a montré des capacités de prise de décision autonome. Par exemple, lorsqu’il rencontrait un obstacle, les capteurs inertiels embarqués détectaient des changements soudains d’accélération, ce qui incitait à son tour le système de contrôle à ajuster son orientation et à recalculer son itinéraire. Le robot a réussi à naviguer dans des passages étroits grâce à des ajustements de posture et a exécuté des demi-tours face à des obstacles infranchissables. Pendant les tests de perturbation, l’algorithme de rétroaction corrigeait rapidement les déviations des angles de lacet, de tangage et de roulis causées par des forces externes comme les vagues ou un contact physique, maintenant un contrôle stable de la trajectoire. Les capteurs de température intégrés ont permis une surveillance environnementale, cartographiant les gradients thermiques dans les environnements aquatiques.
« Intégrer verticalement l’actionnement, la détection et l’alimentation à travers le corps du robot nous permet de maximiser la surface fonctionnelle sans compromettre la ‘souplesse’ du robot, a indiqué le Pr. assistant Wu. Cette conception permet au robot de se déplacer, de sentir et de répondre à son environnement en temps réel. »
Pour l’avenir, les chercheurs prévoient d’étendre les capacités de détection du robot en incorporant des capteurs miniaturisés tels que des capteurs ultrasons pour la perception de l’environnement ou des détecteurs chimiques pour la surveillance de la qualité de l’eau. Ils explorent également comment l’amélioration magnétique pourrait bénéficier à d’autres chimies de batteries, comme les lithium-ion, ou à d’autres formes de batteries, comme les fibres de batterie portables, pour améliorer la densité énergétique et l’endurance opérationnelle.
« Notre vision est de permettre à des robots souples de penser et d’agir de manière autonome dans des espaces complexes ou inaccessibles — que ce soit pour inspecter des pipelines, surveiller des habitats marins ou soutenir des interventions médicales en salle d’opération, a poursuivi le Pr. assistant Wu. Grâce à une réflexion créative et critique sur la manière dont l’énergie et l’intelligence sont intégrées au corps, nous pouvons rapprocher la robotique souple bien plus des conceptions de la nature elle-même — comme la gracieuse géante des mers, la raie manta. »
Le travail du Pr. assistant Wu a été réalisé en collaboration avec des chercheurs de l’Université Tsinghua, de l’Université de Californie, Los Angeles (UCLA) et du Dartmouth College.
Article : Magnetic field–enhanced vertical integration enables embodied intelligence in untethered soft robots – Journal : Science Advances – Méthode : Experimental study – DOI : 10.1126/sciadv.adv9572
Source : NUS
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.