Des chercheurs américains ont mis au point des actionneurs hydrauliques miniatures et souples capables de contrôler la déformation et le mouvement de robots souples de moins d’un millimètre d’épaisseur. Cette technique fonctionne également avec des matériaux à mémoire de forme, permettant de verrouiller les robots souples dans une forme souhaitée et de les ramener à leur forme originale à volonté.
La robotique souple offre de nombreuses applications, mais la conception des actionneurs qui animent ces robots à petite échelle reste un défi. Jie Yin, auteur correspondant de l’étude et professeur associé en ingénierie mécanique et aérospatiale à NC State, explique : « Notre approche utilise des technologies d’impression 3D multi-matériaux disponibles dans le commerce et des polymères à mémoire de forme pour créer des actionneurs souples à l’échelle microscopique, permettant un contrôle exceptionnel et une grande délicatesse. »
Structure et fonctionnement des robots souples
La nouvelle technique repose sur la création de robots souples composés de deux couches. La première couche est un polymère flexible, imprimé en 3D, intégrant un réseau de microcanaux fluidiques. La seconde couche est un polymère à mémoire de forme flexible. Ensemble, le robot souple ne mesure que 0,8 millimètre d’épaisseur.
En pompant du fluide dans les microcanaux, une pression hydraulique est créée, forçant le robot à se déplacer et à changer de forme. Le motif des microcanaux contrôle le mouvement et la déformation du robot, qu’il se plie, se torde, etc. La quantité de fluide introduite et la vitesse d’introduction déterminent la rapidité du mouvement et la force exercée par le robot.
Verrouillage et déverrouillage des formes
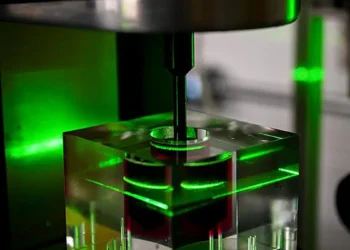
Pour « figer » la forme du robot, une chaleur modérée (64°C) est appliquée, puis le robot est laissé refroidir brièvement. Cela empêche le robot de revenir à sa forme originale, même après le retrait du fluide des microcanaux. Pour revenir à la forme initiale, il suffit de réappliquer la chaleur après avoir pompé le fluide, et le robot reprend sa configuration d’origine.
Yinding Chi, co-auteur principal de l’étude et ancien doctorant à NC State, souligne : « Un facteur clé est d’ajuster finement l’épaisseur de la couche à mémoire de forme par rapport à celle contenant les microcanaux fluidiques. La couche à mémoire de forme doit être suffisamment fine pour se plier sous la pression de l’actionneur, mais assez épaisse pour maintenir la forme du robot après le retrait de la pression. »
Applications pratiques et démonstrations
Pour démontrer la technique, les chercheurs ont créé un robot souple « pinceur » capable de saisir de petits objets. En appliquant une pression hydraulique, le pinceur se referme sur un objet. En appliquant de la chaleur, le pinceur est fixé en position « fermée », même après la libération de la pression. Le pinceur peut alors être déplacé, transportant l’objet, puis relâché en réappliquant de la chaleur. Une vidéo de ces robots souples en action est disponible à l’adresse suivante : https://youtu.be/5SIwsw9IyIc.
Haitao Qing, co-auteur principal de l’étude et doctorant à NC State, précise : « Ces robots étant très fins, ils peuvent être chauffés rapidement et facilement à 64°C à l’aide d’une petite source de lumière infrarouge, et refroidissent également très rapidement. Toute cette série d’opérations ne prend qu’environ deux minutes. »
Qing ajoute : « Le mouvement ne se limite pas à un pinceur qui se referme. Nous avons également démontré un pinceur inspiré des vignes dans la nature, qui s’enroule rapidement autour d’un objet et le serre fermement, permettant une prise sécurisée. »
Perspectives et applications futures
Ce travail constitue une preuve de concept pour cette nouvelle technique, et les chercheurs sont enthousiastes quant aux applications potentielles de cette classe d’actionneurs souples miniatures dans les robots souples à petite échelle, les machines à changement de forme et l’ingénierie biomédicale.
L’article intitulé « Fully 3D-Printed Miniature Soft Hydraulic Actuators with Shape Memory Effect for Morphing and Manipulation » est publié dans la revue Advanced Materials. L’article a été cosigné par Yaoye Hong, ancien doctorant à NC State, Yao Zhao et Yanbin Li, chercheurs postdoctoraux à NC State, et Fangjie Qi, doctorant à NC State.