L’Université de Californie à San Diego, en collaboration avec les chercheurs de la BASF corporation, fait sensation dans le monde de la robotique grâce à un nouveau dispositif : un préhenseur robotique doux, créé en une seule impression 3D et ne nécessitant pas d’électronique pour fonctionner.
Le préhenseur robotique doux, conçu par une équipe de roboticiens, est prêt à l’emploi dès sa sortie de l’imprimante 3D. Equipé de capteurs de gravité et de toucher intégrés, il est capable de saisir, de tenir et de libérer des objets, une capacité inédite avant cette réalisation.
Yichen Zhai, chercheur postdoctoral dans le laboratoire de conception et de robotique bio-inspirée de l’Université de Californie à San Diego et principal auteur de l’étude, a expliqué : « Nous avons conçu des fonctions permettant à une série de vannes de permettre au préhenseur de saisir au contact et de libérer au bon moment. C’est la première fois qu’un tel préhenseur peut à la fois saisir et libérer. Il suffit de tourner le préhenseur horizontalement. Cela déclenche un changement dans le flux d’air dans les vannes, ce qui fait que les deux doigts du préhenseur se relâchent. »

La robotique douce offre la possibilité d’une interaction sécurisée entre robots et humains ou objets délicats. Cette pince imprimée peut être montée sur un bras robotique pour des applications de fabrication industrielle, de production alimentaire et de manipulation de fruits et légumes. Il peut également être monté sur un robot pour des tâches de recherche et d’exploration. De plus, il peut fonctionner de manière autonome, avec une bouteille de gaz à haute pression comme seule source d’énergie.
Surmonter les obstacles de l’impression 3D
Les robots doux imprimés en 3D ont souvent un certain degré de rigidité, présentent de nombreuses fuites dès leur sortie de l’imprimante et nécessitent une quantité non négligeable de traitement et d’assemblage après l’impression pour être utilisables.
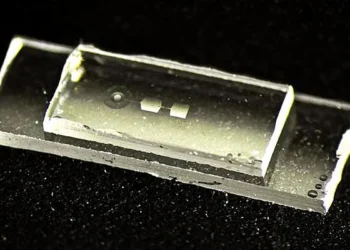
L’équipe de chercheurs a surmonté ces défis en développant une nouvelle méthode d’impression 3D. Celle-ci implique que la buse de l’imprimante suit un chemin continu à travers tout le motif de chaque couche imprimée. « C’est comme dessiner une image sans jamais lever le crayon de la page, » a expliqué Michael T. Tolley, auteur principal de l’article et professeur associé à l’UC San Diego Jacobs School of Engineering.
Cette méthode réduit les risques de fuites et de défauts dans la pièce imprimée, qui sont très courants lors de l’impression avec des matériaux doux. Elle permet également l’impression de parois fines, jusqu’à 0,5 millimètre d’épaisseur. Les parois plus fines et les formes complexes et courbées permettent une plus grande amplitude de déformation, aboutissant à une structure plus douce dans l’ensemble.
En synthèse
L’impression 3D a fait un pas de géant avec cette nouvelle technologie de préhenseur robotique doux. Sans nécessiter d’électronique, ce préhenseur est capable de saisir, tenir et libérer des objets, ce qui ouvre de nouvelles perspectives pour l’interaction entre les robots et les humains ou les objets délicats. Grâce à une nouvelle méthode d’impression 3D, l’équipe de chercheurs a réussi à surmonter les défis associés à la création de robots doux, promettant un avenir prometteur pour cette technologie.
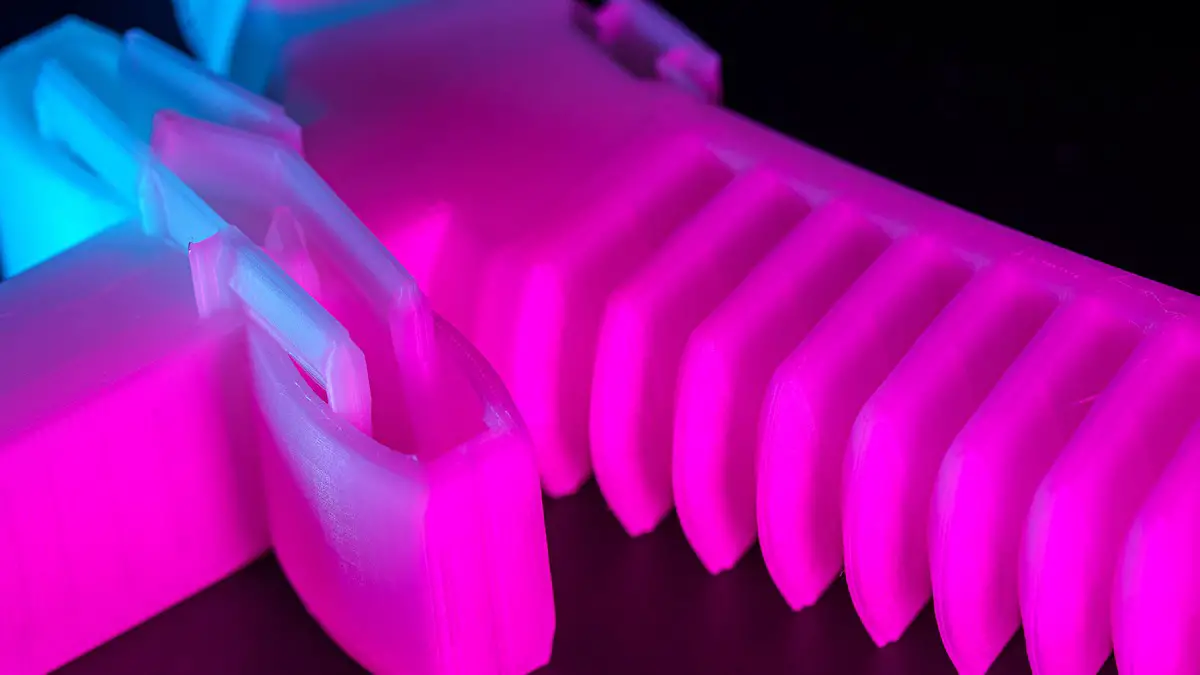
Légende illustration principale : Gros plan sur une pince robotique souple qui est non seulement imprimée en 3D en une seule fois, mais qui n’a pas non plus besoin d’électronique pour fonctionner. Ce dispositif a été mis au point par une équipe de roboticiens de l’université de Californie à San Diego, en collaboration avec des chercheurs de la société BASF, qui ont présenté leurs travaux dans un numéro récent de Science Robotics. Les chercheurs souhaitaient concevoir une pince souple prête à l’emploi dès sa sortie de l’imprimante 3D, équipée de capteurs de gravité et de toucher intégrés. La pince peut ainsi saisir, tenir et relâcher des objets. Aucune pince de ce type n’existait avant ces travaux. Credit : University of California San Diego Jacobs School of Engineering
Fabrication numérique de dispositifs robotiques souples monolithiques autonomes avec circuits de contrôle fluidique intégrésYichen Zhain, Jioayao Yan, Benjamin Shih, Michael T. Tolley, Université de Californie à San DiegoAlbert De Boer, Martin Faber, Joshua Speros, Rohini Gupta, BASFCe travail a été soutenu par BASF CorporationY.Z., M.T.T., A.D.B., M.F., J.S. et R.G. sont les inventeurs d’une demande de brevet déposée par l’université de Californie à San Diego, qui couvre la conception de la pince pneumatique souple autonome imprimée en 3D. DOI : 10.1126/scirobotics.adg3792
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.