Comment arrêter automatiquement une horde de robots actifs ? En arrêtant leur dynamique de manière auto-entretenue. Ce phénomène a été découvert par des physiciens de l’université Heinrich Heine de Düsseldorf (HHU) et de l’université La Sapienza de Rome. Le principe du seuil de friction statique avec le sol joue ici un rôle décisif : il élimine l’énergie cinétique de deux robots après une collision mutuelle de manière si efficace qu’ils ne peuvent plus se mettre en mouvement. Les chercheurs décrivent dans la revue Nature Communications que cet effet fondamental peut également être utilisé pour construire des systèmes robotiques mobiles contrôlables.
La friction génère de la chaleur, comme le sait toute personne qui s’est déjà frotté les mains en hiver. Et la friction coûte de l’énergie. La friction entre les pneus d’un véhicule et la route, par exemple, ralentit progressivement une voiture en mouvement, à moins d’appuyer sur l’accélérateur. Deux corps solides, l’un posé sur l’autre, ne bougeront pas, même s’ils sont légèrement inclinés, car la friction statique les maintient ensemble. Ce n’est que lorsqu’un angle de basculement critique est atteint que le corps supérieur glisse, une fois que la friction a été surmontée par la force de gravité. Les physiciens appellent cela la friction statique « sèche » (en l’absence de lubrifiant), également connue sous le nom de friction de Coulomb.
L’effet de la friction de Coulomb sur le mouvement est important dans de nombreux scénarios d’application. Par exemple, lorsque des grains secoués sont censés s’écouler d’un silo, la force motrice ou « activité » n’est pas constante, mais fluctuante. Cela entraîne un mouvement complexe d’arrêt et de redémarrage, car une particule se déplace jusqu’à ce qu’elle soit ralentie par une fluctuation défavorable, puis immobilisée par la friction statique, pour recommencer à se déplacer lorsque la fluctuation favorable suivante se produit. En physique, une particule au repos est dite « froide », tandis qu’une particule en mouvement est « chaude ». La friction statique provoque donc finalement le refroidissement des particules actives.
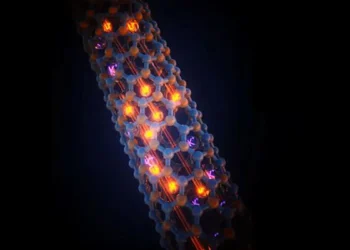
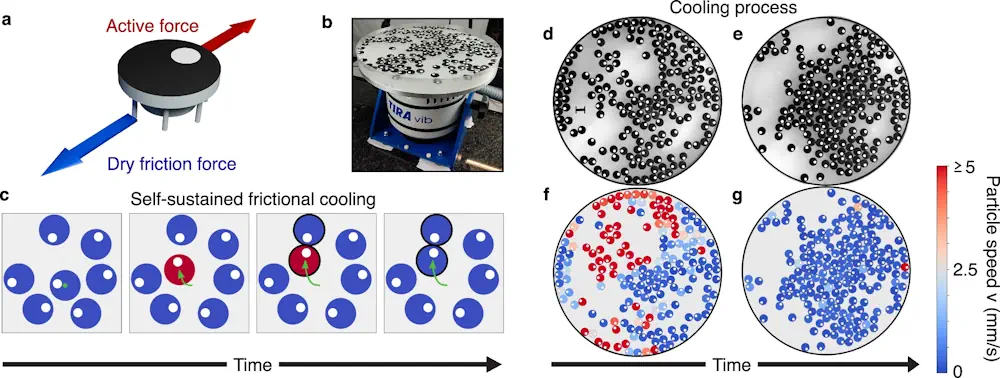
En collaboration avec le professeur Lorenzo Caprini de Rome, un groupe de physiciens dirigé par le professeur Hartmut Löwen de l’Institut de physique théorique II de l’université Heinrich Heine de Düsseldorf a étudié le comportement de nombreux objets actifs de ce type. Dans une expérience de démonstration, des centaines de mini-robots imprimés en 3D se sont précipités, entraînés par une plaque vibrant verticalement.
En se déplaçant, les robots en essaim se sont continuellement heurtés les uns aux autres. Compte tenu de la forte densité et de la faible force motrice près du seuil, le frottement statique s’installe lors des collisions, provoquant à plusieurs reprises l’arrêt des particules (robots) en collision. Au fil du temps, cela conduit à la formation de grappes de robots qui ne bougent plus, c’est-à-dire « froids ».
Pour le professeur Löwen : « Il est intéressant de noter qu’avec de grandes grappes qui changent dynamiquement, une configuration mixte émerge dans laquelle des zones froides coexistent avec des zones chaudes. En équilibre, cela est impossible, car de telles différences de température s’annuleraient immédiatement par des collisions. »
Ce comportement est induit par l’interaction des forces concurrentes de l’activité et du frottement de Coulomb. Dans le cadre de simulations informatiques approfondies menées à l’université Heinrich Heine de Düsseldorf, qui ont fidèlement modélisé l’expérience, le Dr Alexander Antonov, auteur principal de l’étude, a constaté un comportement similaire tant que le principe sous-jacent est un comportement seuil : « Nous avons réalisé ce dont rêvent de nombreux physiciens théoriciens : comprendre le mécanisme physique à l’origine d’un phénomène expérimental et le reproduire ensuite dans des simulations informatiques numériques. »
Le professeur Caprini, coauteur de l’étude, estime qu’il existe un potentiel pour des applications futures : « Le point essentiel est qu’aucune intervention extérieure n’est nécessaire pour refroidir le système. Au contraire, les robots se refroidissent eux-mêmes en entrant en collision. »
Le professeur Löwen voit également des scénarios d’application potentiels : « Cet effet de refroidissement inattendu pourrait être utilisé à l’avenir pour contrôler automatiquement des armées entières de robots ou le comportement collectif de matériaux en vrac, sans intervention extérieure. »
Article : Alexander P. Antonov, Marco Musacchio, Hartmut Löwen & Lorenzo Caprini. Self-sustained frictional cooling in active matter. Nature Communications 16:7235 (2025). DOI: 10.1038/s41467-025-62626-9
Source : U. HHU
Fiche Synthétique
Immobilisation automatique et contrôle d’essaims robotiques : tout comprendre sur la friction statique
À qui s’adresse ce contenu ?
- Ingénieurs en robotique, chercheurs en physique, professionnels de l’automatisation, décideurs du secteur industriel.
- Toute personne recherchant des solutions pour contrôler automatiquement de grands groupes de robots sans intervention humaine.
Questions auxquelles ce contenu répond :
- Comment arrêter automatiquement un grand nombre de robots actifs sans commande externe ?
- Existe-t-il un phénomène physique permettant la régulation autonome d’essaims robotiques ?
- Quels sont les avantages de la friction statique dans la gestion collective des robots ?
Problème résolu : automatisez l’arrêt collectif de robots sans intervention extérieure
Lorsqu’on cherche des méthodes innovantes pour arrêter ou contrôler un essaim de robots sans nécessiter de pilotage externe, la friction statique s’impose comme une solution élégante et efficace. Cette découverte, menée par des physiciens de l’Université Heinrich Heine de Düsseldorf (HHU) et de l’université La Sapienza de Rome, apporte une réponse concrète aux défis du contrôle autonome en robotique collective.
En quoi consiste la friction statique appliquée aux robots ?
- Principe : Lors de collisions entre robots, la friction statique au sol absorbe rapidement l’énergie cinétique, immobilisant les robots sans qu’ils puissent redémarrer d’eux-mêmes.
- Effet observé : En augmentant la densité et en diminuant la force motrice, des grappes de robots passent spontanément de l’état « actif » (« chaud ») à l’état « immobile » (« froid »).
- Données clés : Lors d’expériences menées sur des centaines de mini-robots 3D imprimés, ce phénomène a permis l’arrêt autonome d’un essaim entier après collisions répétées.
Points-clés pour les praticiens et chercheurs
- Applications concrètes
- Contrôle automatique de lignes d’assemblage robotisées.
- Gestion d’essaims robotiques dans la logistique ou la manipulation de matériaux en vrac.
- Modélisation fiable du comportement collectif à l’aide de simulations numériques reproduisant fidèlement l’expérience.
- Avantages
- Aucune intervention humaine ni commande centralisée nécessaire.
- Refroidissement collectif (arrêt progressif) sans apport énergétique ou système de contrôle coûteux.
- Possibilité d’obtenir des zones mixtes, où certains robots restent actifs pendant que d’autres sont immobilisés, permettant un contrôle flexible.
Questions populaires associées :
- Quels sont les meilleurs moyens de contrôler un essaim de robots sans supervision ?
- Comment la friction statique influence-t-elle le comportement collectif des robots ?
- Peut-on utiliser la friction pour sécuriser des systèmes robotiques en cas de dysfonctionnement ?
Résultats et propositions de valeur
- Robustesse : Le mécanisme s’auto-entretient, assurant la sécurité du système face à des imprévus.
- Précision scientifique : Validé expérimentalement et par simulation numérique sous la direction de l’équipe du Professeur Hartmut Löwen (HHU) et du Professeur Lorenzo Caprini (La Sapienza).
- Potentiel industriel : Ouverture vers du robotic cooling sans énergie extérieure, générant économies et sécurité accrue.
Marques et institutions associées :
- Heinrich Heine Universität Düsseldorf (HHU)
- Université La Sapienza de Rome
Innovation validée par nature scientifique, adaptée aux enjeux concrets de la robotique industrielle et collective.
Vous cherchez à automatiser l’arrêt collectif de robots ou à comprendre les interactions physiques au sein d’essaims autonomes ? La friction statique est la clé pour une immobilisation sécurisée et sans intervention.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.