Des robots miniatures capables de se faufiler dans les espaces les plus étroits : voici CLARI, la petite machine conçue pour changer passivement de forme et se glisser dans les interstices resserrés.
S’inspirant du monde des insectes, ce robot novateur pourrait révolutionner l’intervention des secours après les catastrophes.
Une machine miniature et modulable
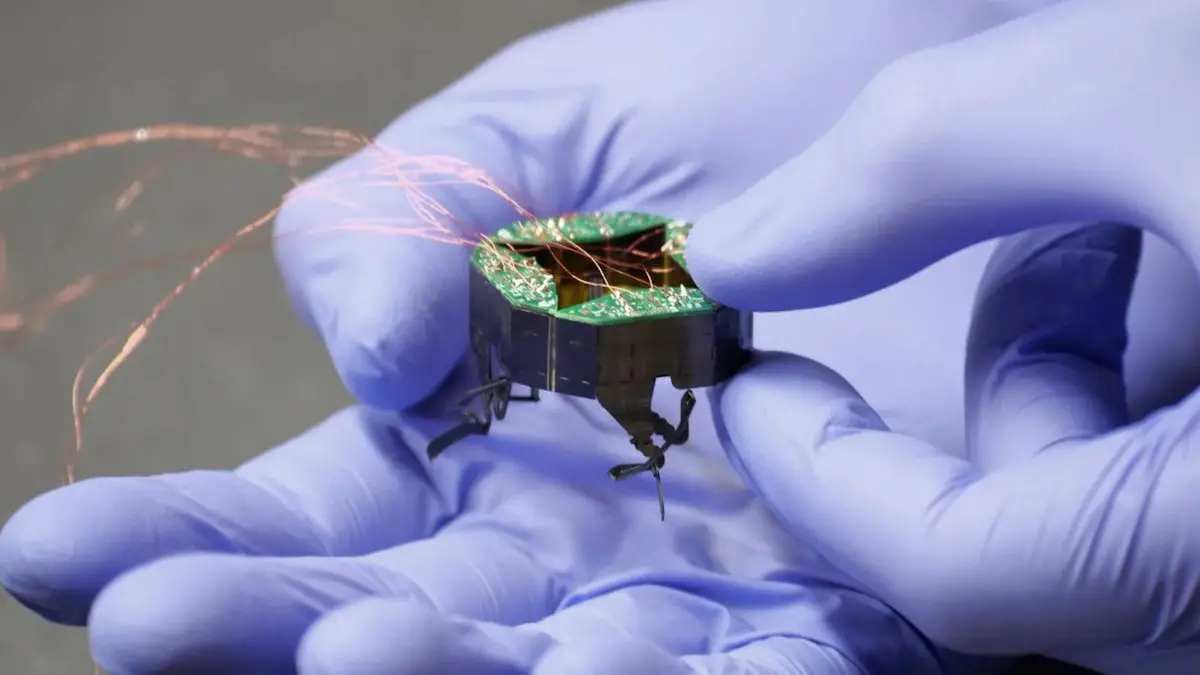
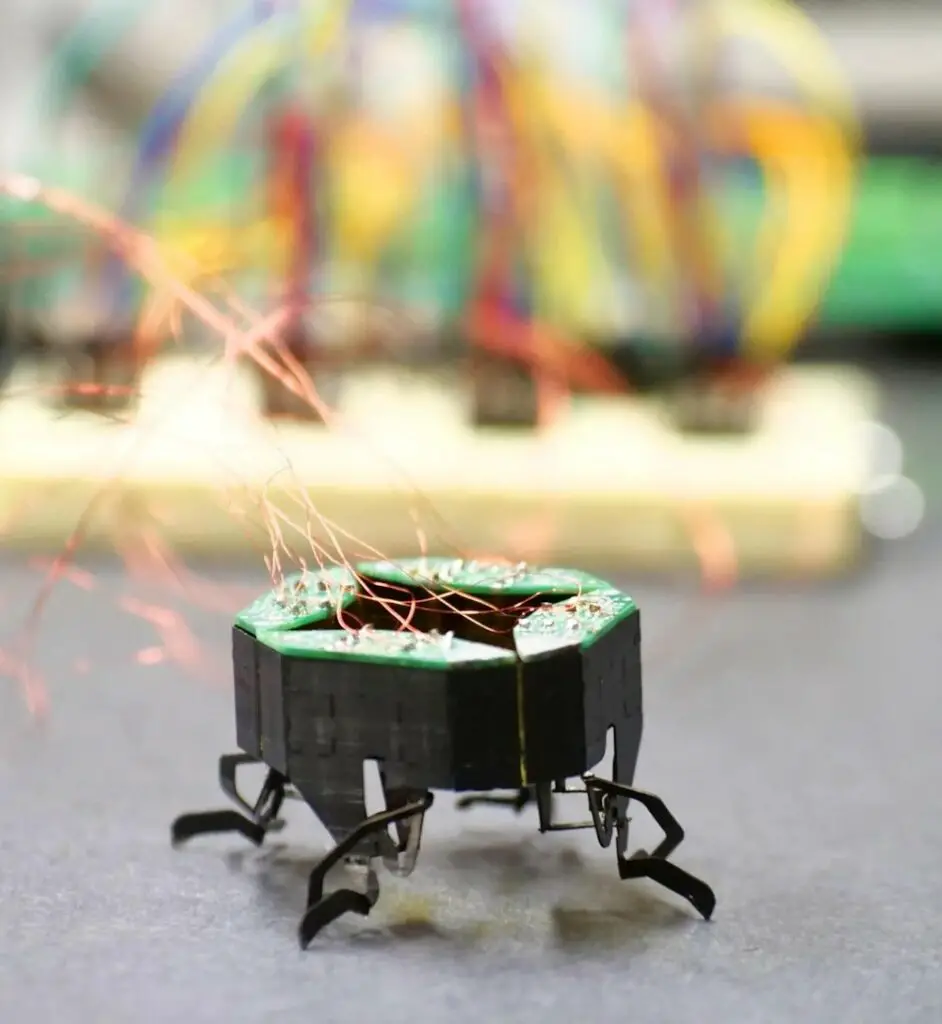
CLARI, acronyme anglais pour Compliant Legged Articulated Robotic Insect, ( ou insecte robotique articulé et à pattes adaptatives), est le fruit du travail d’une équipe d’ingénieurs de l’Université du Colorado à Boulder. Plusieurs de ces robots tiennent aisément dans la paume d’une main et pèsent moins qu’une balle de ping-pong.
Grâce à sa capacité à modifier sa forme, passant d’une silhouette carrée à une structure effilée, CLARI peut se faufiler dans les espaces exigus, explique Heiko Kabutz, doctorant en génie mécanique à l’Université.
Heiko Kabutz et ses collègues ont présenté ce robot miniature dans une étude parue le 30 août dans la revue Advanced Intelligent Systems. Pour l’instant, CLARI possède quatre pattes, mais sa conception modulaire permet aux ingénieurs d’assembler ses appendices de multiples façons, donnant vie à des robots aussi originaux que tortueux.
« Il a une conception modulaire, ce qui signifie qu’il est très facile à personnaliser et à équiper de pattes supplémentaires« , détaille H. Kabutz. « À terme, nous aimerions construire un robot à huit pattes semblable à une araignée, capable de marcher sur une toile.«
Un robot prometteur
CLARI n’en est qu’à ses balbutiements, précise Kaushik Jayaram, co-auteur de l’étude et professeur adjoint en génie mécanique à l’Université du Colorado. Le robot est encore relié à des câbles qui lui fournissent l’énergie et transmettent des commandes de base.
Mais il espère bien qu’un jour, ces petites machines pourront ramper de façon autonome là où aucun robot n’est jamais allé, comme à l’intérieur des réacteurs d’avion ou des décombres d’immeubles effondrés.
« La plupart des robots actuels ressemblent fondamentalement à un cube« , observe K. Jayaram. « Pourquoi devraient-ils tous être identiques ? Les animaux ont toutes les formes et toutes les tailles. »
Inspiration animale
Le Professeur Jayaram est familier des robots qui reflètent la diversité du monde animal. Lorsqu’il était étudiant diplômé à l’Université de Californie à Berkeley, il a conçu un robot capable de se comprimer pour réduire sa hauteur de moitié, à l’instar des blattes se faufilant dans les fissures d’un mur. Mais cette machine ne représentait que la face émergée de l’iceberg en matière de flexibilité animale.
« Nous étions capables de nous glisser dans des espaces verticaux étroits« , se souvient Jayaram. « Mais cela m’a fait réfléchir : ce n’est qu’une façon de se comprimer. Quelles sont les autres ?«
C’est là qu’intervient CLARI, créé pour se faufiler dans des espaces horizontaux exigus. Dans sa forme la plus basique, le robot a la silhouette d’un carré avec une patte sur chacun de ses quatre côtés. Selon la façon dont on le comprime, CLARI peut cependant devenir plus large, tel un crabe, ou plus allongé, à l’image du cafard, l’insecte favori de Jayaram. Au total, le robot peut passer d’une largeur d’environ 34 millimètres dans sa forme carrée à 21 millimètres dans sa version effilée.
Contrairement au précédent cafard mécanisé de K. Jayaram, chacune des pattes de CLARI fonctionne presque comme un robot indépendant, avec sa propre carte de circuits imprimés et ses deux actionneurs doubles qui déplacent la patte vers l’avant, l’arrière, sur les côtés, à l’image d’une hanche humaine. En théorie, cette modularité pourrait permettre aux robots CLARI d’adopter une grande variété de formes.
Ce que nous voulons, ce sont des robots polyvalents capables de changer de forme et de s’adapter aux conditions environnementales, explique Jayaram. Dans le monde animal, on pourrait penser à un amibe, qui n’a pas de forme définie mais peut se modifier pour se déplacer rapidement ou engloutir de la nourriture.«
L’exploration d’espaces inaccessibles
Les deux chercheurs considèrent leur conception actuelle comme la première d’une série de robots CLARI qu’ils espèrent rendre plus petits et agiles. Dans les prochaines versions, les chercheurs veulent intégrer des capteurs pour que CLARI puisse détecter et réagir aux obstacles. L’équipe examine également comment conférer au robot le bon équilibre entre flexibilité et solidité, une tâche qui ne fera que se complexifier à mesure que des pattes supplémentaires seront ajoutées, précise H. Kabutz.
À terme, l’équipe souhaite développer des robots à morphologie variable capables non seulement de se déplacer en laboratoire mais aussi dans des environnements naturels complexes, où les machines devront rebondir sur des obstacles tels que des arbres, ou se faufiler entre les brins d’herbe et les interstices de rochers.
« Quand nous essayons d’attraper un insecte, il peut disparaître dans une fissure, illustre H. Kabutz. Mais avec des robots dotés des capacités d’une araignée ou d’une mouche, nous pourrons y ajouter des caméras ou des capteurs, et commencer à explorer des espaces jusqu’alors inaccessibles.
Tableau récapitulatif des caractéristiques du robot CLARI
| Avantage | Description |
|---|---|
| Taille réduite | Avec une taille de quelques centimètres, CLARI peut se faufiler dans des espaces exigus |
| Poids plume | Avec un poids inférieur à 10 grammes, le robot est facile à transporter et manipuler |
| Modularité | Les pattes de CLARI sont indépendantes et interchangeables, permettant des configurations variées |
| Malléabilité | Grâce à ses pattes articulées, il peut modifier sa forme pour s’adapter aux passages étroits |
| Finesse | La taille et la compressibilité de il lui permettent de passer dans des interstices de quelques millimètres |
| Bio-inspiration | La morphologie de CLARI s’inspire d’insectes comme les cafards ou les araignées |
| Accès difficile | Il rend accessible des environnements confinés impossibles à atteindre pour les robots traditionnels |
| Secours | Il pourrait grandement aider les secouristes à localiser des victimes dans des espaces effondrés |
| Évolutivité | De nouvelles versions de CLARI sont prévues avec plus de pattes, de capteurs et d’autonomie |
Article : « Design of CLARI: A Miniature Modular Origami Passive Shape-Morphing Robot » – DOI: 10.1002/aisy.202300181