Dans le cadre d’une fusion des domaines de la biologie et de la mécanique, des chercheurs japonais ont conçu un robot biohybride à deux jambes qui imite la démarche humaine. Cette création, qui combine des tissus musculaires et des matériaux artificiels ouvre la perspective d’une nouvelle génération de robots capables de mouvements fins et délicats.
Comparativement aux robots, les corps humains sont flexibles, capables de mouvements fins et peuvent convertir l’énergie efficacement en mouvement. S’inspirant de la démarche humaine, des chercheurs du Japon ont conçu un robot biohybride à deux jambes en combinant des tissus musculaires et des matériaux artificiels. Publiée dans la revue Matter, cette méthode permet au robot de marcher et de pivoter.
« La recherche sur les robots biohybrides, qui sont une fusion de biologie et de mécanique, attire récemment l’attention comme un nouveau domaine de la robotique présentant une fonction biologique », déclare l’auteur Shoji Takeuchi de l’Université de Tokyo, au Japon. « L’utilisation de muscles comme actionneurs nous permet de construire un robot compact et d’obtenir des mouvements efficaces et silencieux avec une touche douce. »
Un robot bipède innovant
L’équipe de recherche a conçu un robot à deux jambes, une conception bipède innovante, qui s’appuie sur l’héritage des robots biohybrides qui tirent parti des muscles.
Les tissus musculaires ont permis aux robots biohybrides de ramper et de nager en ligne droite et de faire des virages, mais pas des virages serrés. Pourtant, pouvoir pivoter et faire des virages serrés est une caractéristique essentielle pour les robots afin d’éviter les obstacles.
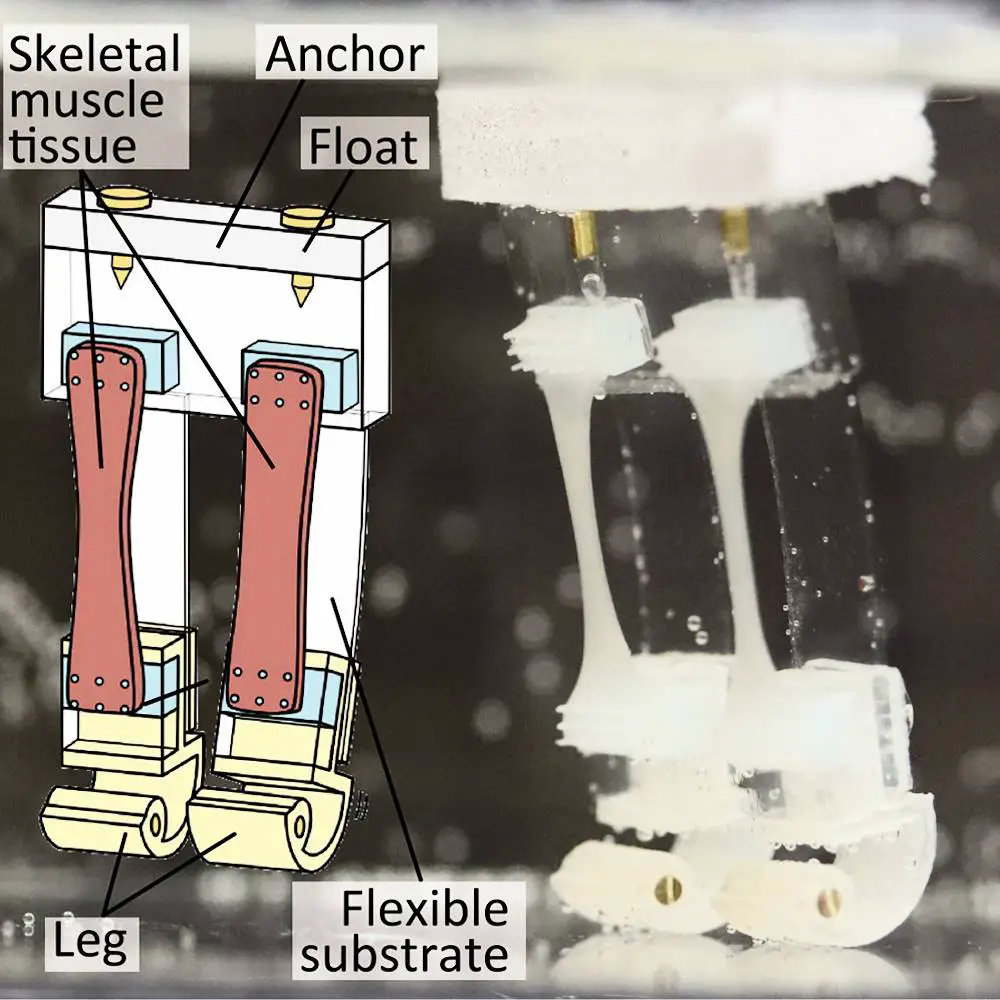
(G) Illustration d’un robot bipède propulsé par des tissus musculaires squelettiques cultivés.
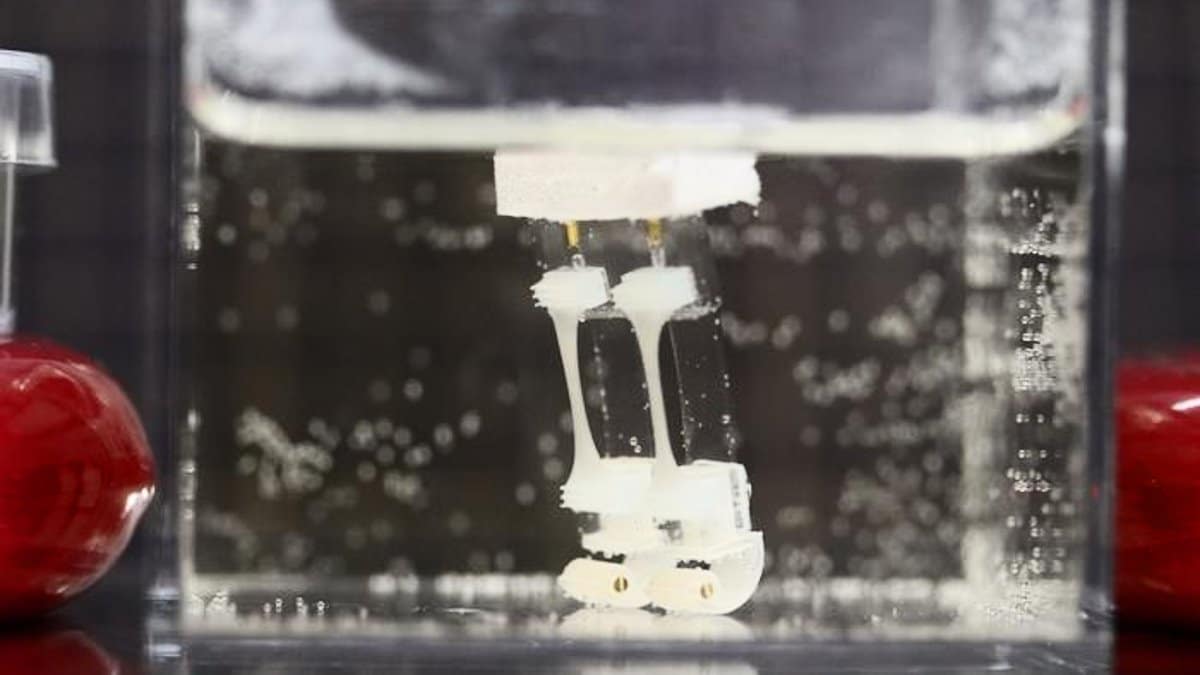
(D) Image du robot bipède biohybride avec des tissus musculaires squelettiques cultivés.
Pour construire un robot plus agile avec des mouvements fins et délicats, les chercheurs ont conçu un robot biohybride qui imite la démarche humaine et fonctionne dans l’eau. Le robot a une partie supérieure en mousse flottante et des jambes lestées pour l’aider à se tenir droit sous l’eau.
Le squelette du robot est principalement fait de caoutchouc de silicone qui peut se plier et se flexionner pour s’adapter aux mouvements musculaires. Les chercheurs ont ensuite fixé des bandes de tissus musculaires squelettiques cultivés en laboratoire au caoutchouc de silicone et à chaque jambe.
Des mouvements fins et délicats
Lorsque les chercheurs ont stimulé le tissu musculaire avec de l’électricité, le muscle s’est contracté, soulevant la jambe. Le talon de la jambe a ensuite atterri en avant lorsque l’électricité s’est dissipée.
En alternant la stimulation électrique entre la jambe gauche et la jambe droite toutes les 5 secondes, le robot biohybride a réussi à «marcher» à la vitesse de 5,4 mm/min (0,002 mph). Pour tourner, les chercheurs ont stimulé à plusieurs reprises la jambe droite toutes les 5 secondes tandis que la jambe gauche servait d’ancre.
Le robot a effectué un virage à gauche de 90 degrés en 62 secondes. Les résultats ont montré que le robot bipède musculaire peut marcher, s’arrêter et effectuer des mouvements de virage précis.
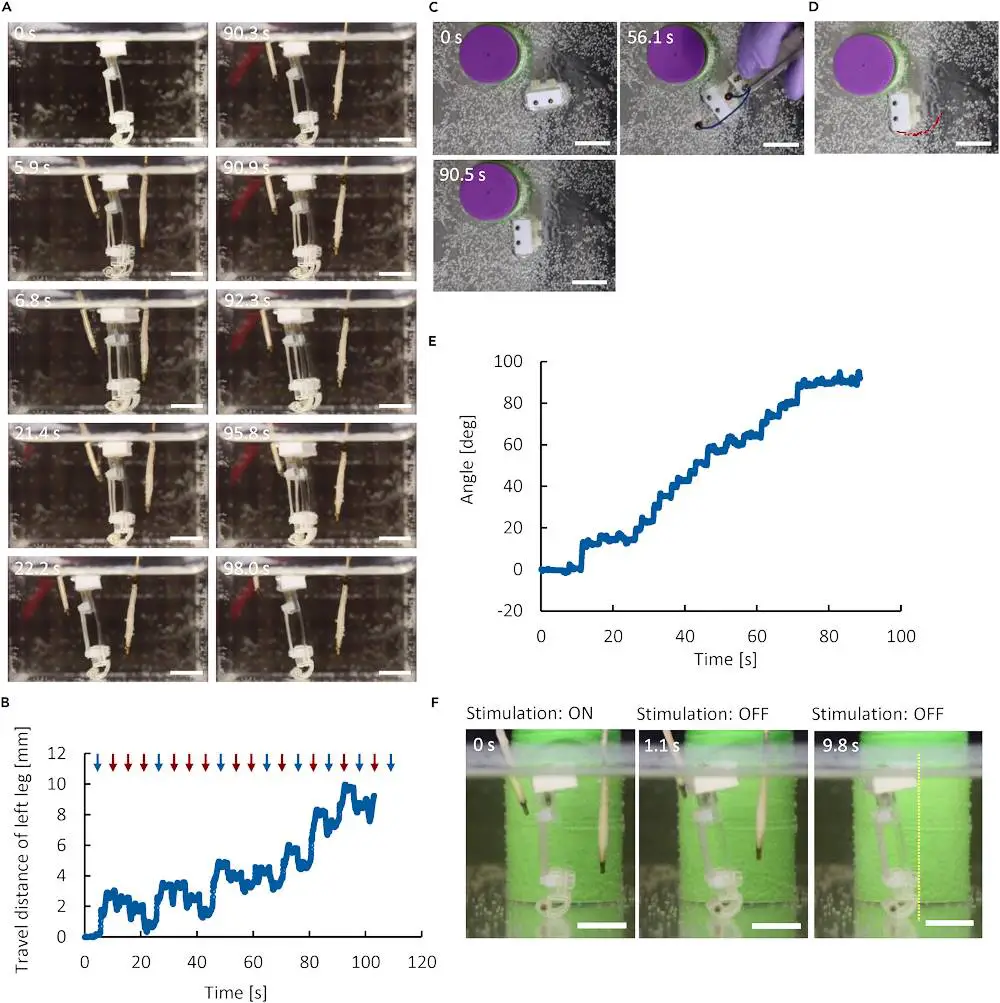
(C) Mouvement de rotation du robot bipède. (D) Trajectoire du mouvement de rotation du robot bipède.
(E) Relation entre l’angle de rotation et le temps pendant le mouvement de rotation. (F) Mouvement d’arrêt du robot bipède lorsque les stimulations électriques n’ont pas été appliquées. Barres d’échelle : 1 cm (A), 2 cm (C), 2 cm (D) et 1 cm (F).
Des perspectives d’amélioration
« Actuellement, nous déplaçons manuellement une paire d’électrodes pour appliquer un champ électrique individuellement aux jambes, ce qui prend du temps », explique Shoji Takeuchi. « À l’avenir, en intégrant les électrodes dans le robot, nous espérons augmenter la vitesse plus efficacement. »
L’équipe prévoit également de donner des articulations et des tissus musculaires plus épais au robot bipède pour permettre des mouvements plus sophistiqués et puissants. Mais avant d’améliorer le robot avec plus de composants biologiques, Shoji Takeuchi dit que l’équipe devra intégrer un système d’approvisionnement en nutriments pour soutenir les tissus vivants et les structures de dispositifs qui permettent au robot de fonctionner dans l’air.
« Une acclamation a éclaté lors de notre réunion de laboratoire régulière lorsque nous avons vu le robot marcher avec succès sur la vidéo », se souvient Shoji Takeuchi. « Bien qu’ils puissent sembler être de petits pas, ils sont en fait des pas de géant pour les robots biohybrides. »
Légende illustration / Robot biohybride à deux jambes – Crédit : Shoji Takeuchi research group, University of Tokyo
Article : « Biohybrid bipedal robot powered by skeletal muscle tissue » – DOI: 10.1016/j.matt.2023.12.035