En ingénierie tissulaire, la moindre force inappropriée peut nuire à une culture vivante. Les amas de cellules en 3D ( appelés sphéroïdes ) peuvent être utilisés pour modéliser des tissus humains complexes, car ils recréent des interactions spécifiques entre cellules et entre cellules et matrice. Mais ces sphéroïdes sont également fragiles, et les techniques courantes de déplacement manuel par aspiration peuvent facilement les endommager.
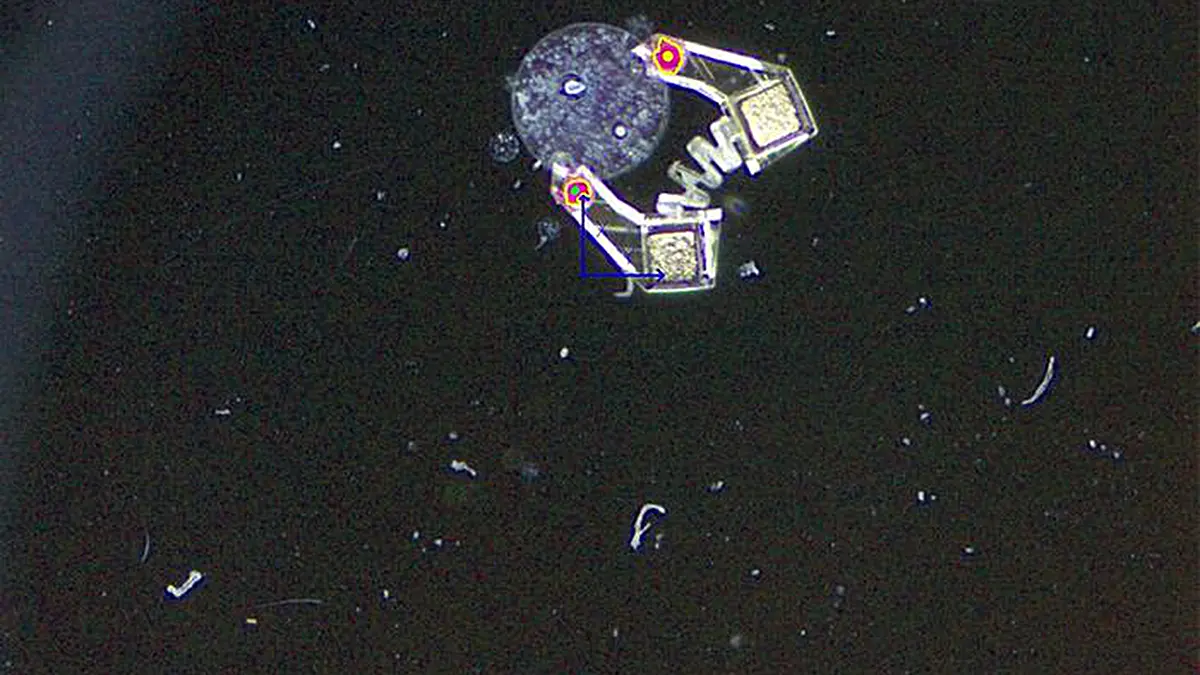
Dans APL Bioengineering, publié par AIP Publishing, des chercheurs de l’Université Purdue ont conçu un robot miniature sensible à la force, appelé micropréhenseur mobile (MMG), pour manipuler ces sphéroïdes avec précaution.
« D’autres techniques pour le bio-assemblage de sphéroïdes peuvent affecter la construction tissulaire et/ou appliquer des forces de manipulation limitées », a déclaré l’auteur David Cappelleri. « Le MMG sensible à la force présenté ici répond à ces problèmes actuels en permettant le bio-assemblage sécurisé de différents sphéroïdes en une seule construction. »
L’intégration de différents types de sphéroïdes au sein d’une même culture est essentielle pour l’ingénierie tissulaire, car, dans la réalité, plusieurs types de cellules peuvent se développer dans un tissu. Mais les sphéroïdes individuels doivent être cultivés sur place puis déplacés, ce qui introduit un risque de dommage pour le sphéroïde.
Le MMG est un robot miniature qui ressemble à la partie de préhension d’une grue à peluche. Il est constitué de deux bras reliés par une charnière pour une préhension contrôlée — et douce. Mieux encore, il est contrôlé par des aimants, biocompatibles avec les sphéroïdes, ce qui réduit le risque de dommages collatéraux.
« C’était une grande partie de la conception : trouver un moyen d’utiliser les champs magnétiques à la fois pour la locomotion et le contrôle de l’ouverture et de la fermeture des mâchoires du préhenseur », a expliqué Cappelleri.
La force de préhension est surveillée et ajustée en temps réel, ce qui permet aux chercheurs de s’adapter à la nature délicate des cellules. Après avoir simulé l’efficacité du MMG, des tests in vitro ont montré que le dispositif était capable de déplacer et d’organiser avec succès les sphéroïdes en motifs ordonnés.
Les chercheurs ont également vérifié que la gamme des forces de préhension exercées par le MMG était compatible avec le mouvement et la survie ultérieure des sphéroïdes.
Actuellement, le mini-robot peut assembler avec succès les sphéroïdes en une « feuille » cellulaire, mais à l’avenir, les chercheurs souhaitent utiliser leurs mini-robots pour créer des tissus entièrement ingénierés. De plus, ils souhaitent franchir une étape supplémentaire avec leurs micropréhenseurs, en passant d’un contrôle manuel à un assemblage automatisé des sphéroïdes.
Auteurs : Aaron C. Davis, Madison O’Brien, Iris Gong, Luis Solorio et David J. Cappelleri. Article : Force-sensing mobile microrobotic grippers for gentle and precise bioassembly of cell spheroids – Journal : APL Bioengineering – DOI : Lien vers l’étude
Source : AIP