Grâce à leur capacité à changer de forme et à manipuler des objets délicats, les robots mous pourraient servir d’implants médicaux, administrer des médicaments à l’intérieur du corps et aider à explorer des environnements dangereux. Mais ces machines malléables sont souvent limitées par des pièces mécaniques rigides ou des systèmes externes qui fournissent l’énergie ou les aident à se déplacer.
Désormais, des ingénieurs de Princeton ont conçu et construit des robots hybrides mous-rigides qui se déplacent et se transforment sans avoir besoin de moteurs ou de contrôles pneumatiques externes. Pour ce faire, l’équipe a combiné un polymère imprimable, appelé élastomère à cristal liquide, avec de l’électronique flexible et des techniques de pliage basées sur l’art de l’origami.
Dans un article publié le 20 mars dans la revue Advanced Functional Materials, une équipe de recherche dirigée par les professeurs Emily Davidson et Glaucio Paulino a rapporté avoir utilisé une imprimante 3D pour créer un robot mou reconfigurable capable de se déplacer de manière répétée sans dégradation notable.
En guise de démonstration, les chercheurs ont construit un robot mou en forme de grue, une figure origami classique, qui bat des ailes lorsqu’il est alimenté en électricité. La grue se déplace sans moteur. Au lieu de cela, le mouvement du robot repose sur un chauffage ciblé du polymère pour contrôler le battement des ailes. L’expérience a également démontré que le robot mou de Princeton peut se déplacer avec précision et de manière répétée et retrouver sa forme d’origine sans usure ni déformation avec des séquences programmables en temps réel, une caractéristique clé pour les futures applications.
La construction commence avec une imprimante 3D et un polymère spécial
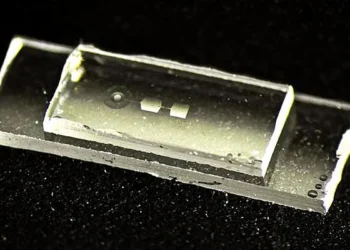
Le système commence par un polymère fondu imprimé en zones structurées à l’aide de l’imprimante 3D personnalisée de Davidson. Malgré sa nature flexible, le polymère utilisé par les chercheurs est un élastomère à cristal liquide, ce qui signifie que ses molécules internes ont une structure ordonnée. Le groupe de Davidson est expert dans le contrôle de la structure des élastomères à cristal liquide par la conception moléculaire, et dans le contrôle de la nanostructure (dans ce cas, l’orientation) des polymères par impression, deux aspects qui ont été cruciaux pour ce projet. Les chercheurs ont programmé l’imprimante pour faire varier l’orientation interne de la structure moléculaire du polymère pendant l’impression. Chacune des zones structurées du matériau imprimé présente un alignement moléculaire cohérent. En empilant ces zones et en les joignant de différentes manières, les chercheurs ont pu créer des charnières dans le matériau qui se plient de manière préprogrammée lorsque le matériau est chauffé.
Dans le cadre de l’impression, les chercheurs ont également ajouté de l’électronique flexible dans les charnières du matériau. La structure flexible des circuits imprimés a permis aux chercheurs de les intégrer directement dans le matériau d’impression plutôt que d’appliquer les circuits lors d’une étape séparée. Cela simplifie la fabrication et permet une plus grande cohérence et une intégration fonctionnelle du circuit dans le robot.
Davidson a noté qu’une avancée critique dans les travaux actuels était l’intégration d’élastomères à cristal liquide imprimés en 3D avec des circuits imprimés pouvant être fabriqués commercialement. La capacité à co-concevoir les charnières en élastomère à cristal liquide et les circuits imprimés flexibles pour entraîner l’actionnement a rendu la fabrication et le contrôle de ces robots mous rigides-mous faisables.
Les circuits imprimés contrôlent le chauffage qui génère le mouvement
Une fois intégrés, ces circuits imprimés permettent aux chercheurs de chauffer des zones extrêmement spécifiques de la structure polymère et d’effectuer un contrôle en boucle fermée à l’aide de capteurs de température intégrés. Ce chauffage exploite la structure soigneusement conçue du polymère, provoquant la contraction du matériau de la manière dont les ingénieurs l’ont programmé dans l’impression du polymère. Ces contractions déclenchent le pliage le long des charnières. Pour garantir que le matériau ne se plie qu’au niveau des charnières, les chercheurs ont ajouté de légers panneaux de fibre de verre aux circuits imprimés flexibles entre les charnières polymères.
Les chercheurs ont utilisé des mathématiques dérivées des modèles d’origami pour contrôler le mouvement des robots sur la base de systèmes de pliage et de dépliage. L’équipe de recherche de Paulino a été pionnière dans l’utilisation de l’origami pour concevoir des implants médicaux, des composants de construction et des robots. Des projets récents incluent des robots mous segmentés qui utilisent des systèmes d’origami pour parcourir des chemins complexes, des robots qui peuvent transformer leurs formes et se reconfigurer de manière adaptative dans un champ magnétique, et des systèmes programmables qui peuvent crypter des informations et fonctionner comme des ordinateurs mécaniques.
Paulino a déclaré qu’une caractéristique importante de la conception est que le logiciel utilisé pour contrôler le robot utilise des capteurs de température intégrés dans l’origami pour compenser les petites erreurs qui s’infiltrent dans le système lorsque le robot change de forme de manière répétée. Paulino a ajouté que la capacité à corriger ces erreurs est essentielle à la durabilité des robots mous.
Le travail a commencé comme un projet de premier cycle
Le développement du nouveau système robotique a commencé comme projet de thèse de premier cycle de David Bershadsky à Princeton. Bershadsky, maintenant en école doctorale à l’Université du Texas, Austin, a obtenu son diplôme en génie électrique en 2024 de Princeton.
Bershadsky a déclaré qu’il s’intéressait à la robotique depuis qu’il a poursuivi un projet au lycée développant une robotique en essaim déployant des unités robotiques individuelles qui changeaient de taille. À son arrivée à Princeton, il était intéressé à faire avancer ce travail.
« Je cherchais un moyen de créer facilement et à plusieurs reprises des cellules unitaires qui pourraient se transformer en fonction du volume, » a-t-il expliqué.
Bershadsky a pensé que les élastomères à cristal liquide pourraient servir de véhicule pour créer ce type de système robotique et a approché la professeure Davidson, une experte du matériau, pour obtenir des conseils. Davidson a trouvé l’idée intrigante.
« Elle a dit que tu devrais probablement suivre le cours d’ingénierie de l’origami de Paulino pour avoir une formation plus formelle, » a rapporté Bershadsky. L’un des assistants du cours était Tuo Zhao, un chercheur postdoctoral dans le laboratoire de Paulino qui a aidé à développer la recherche et est l’un des co-auteurs de l’article.
Les chercheurs ont conçu la technologie pour la fabrication
Bershadsky a déclaré que le travail était principalement une « intégration de la science des matériaux avec la robotique avec un accent sur la fabricabilité ».
« Je pense que la grande contribution est que nous avons montré l’intégration d’un système complexe où nous avons un contrôle local du chauffage, » a-t-il souligné. « Nous pouvons contrôler l’activation en fonction de l’endroit où nous chauffons. »
En plus de démontrer la viabilité du système robotique, Bershadsky a créé un outil logiciel que les concepteurs peuvent utiliser pour créer leurs propres robots. L’outil est disponible sur le github du laboratoire et inclus avec l’ensemble de données de l’article.
La partie la plus difficile du travail ?
« Honnêtement, les gens disent que l’intégration du système est la partie difficile, » a révélé Bershadsky. « L’ensemble de ce projet était l’intégration d’un tas de technologies différentes. »
L’article, Digital Actuation Control of Soft Robotic Origami With Self-Folding Liquid Crystal Elastomer Hinges, a été publié en ligne le 21 mars dans la revue Advanced Functional Materials. Les auteurs sont Bershadsky, Davidson, Paulino et Zhao. Le soutien au projet a été fourni en partie par le fonds Kamran Rafieyan ’89 de Princeton pour la recherche de premier cycle, les fonds d’innovation Princeton University Project X, les fonds Princeton Catalysis Initiative, le financement de thèse de fin d’études de la Princeton University School of Engineering and Applied Science, et la National Science Foundation.
Article : Digital Actuation Control of Soft Robotic Origami With Self-Folding Liquid Crystal Elastomer Hinges – Journal : Advanced Functional Materials – Méthode : Experimental study – DOI : Lien vers l’étude
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.