La manipulation d’objets, un geste simple pour les êtres humains, constitue pourtant un défi majeur pour les robots. Les milliards de points de contact potentiels peuvent rendre la tâche complexe et ardue à planifier. Aussi, comment les chercheurs du MIT ont découvert une méthode qui pourrait révolutionner la façon dont les robots interagissent avec les objets, rendant la manipulation complète possible et efficace ?
Imiter la façon dont un être humain porte une boîte lourde implique de réfléchir à des billions de points de contact possibles. La complexité de cette tâche rend la planification presque impossible pour les robots.
Les chercheurs du MIT ont trouvé un moyen de simplifier ce processus en utilisant une technique d’intelligence artificielle appelée lissage. Cette méthode résume de nombreux événements de contact en un nombre réduit de décisions. Cela permet à un algorithme simple d’identifier rapidement un plan de manipulation efficace pour le robot.
Bien qu’elle n’en soit qu’à ses débuts, cette méthode pourrait permettre aux usines d’utiliser des robots mobiles plus petits, capables de manipuler des objets avec l’ensemble de leurs bras ou de leur corps, plutôt que de grands bras robotisés qui ne peuvent les saisir qu’avec le bout des doigts. Cela pourrait contribuer à réduire la consommation d’énergie et les coûts. En outre, cette technique pourrait être utile aux robots envoyés en mission d’exploration sur Mars ou d’autres corps du système solaire, car ils pourraient s’adapter rapidement à l’environnement en n’utilisant qu’un ordinateur de bord.
“Plutôt que de considérer cela comme un système boîte noire, si nous pouvons exploiter la structure de ces types de systèmes robotiques en utilisant des modèles, il y a une opportunité d’accélérer toute la procédure d’essayer de prendre ces décisions et de trouver des plans riches en contacts,” explique H.J. Terry Suh, étudiant diplômé en génie électrique et informatique.
Applications potentielles de la méthode
Encore à ses débuts, cette méthode pourrait permettre l’utilisation de robots mobiles plus petits dans les usines, au lieu de grands bras robotiques. Cela peut contribuer à réduire la consommation d’énergie et à abaisser les coûts. De plus, la technique pourrait être utile pour les missions d’exploration dans le système solaire.
L’apprentissage par renforcement est une technique où un agent, comme un robot, apprend à accomplir une tâche par essai et erreur. Mais cela exige une grande quantité de calcul, surtout pour la manipulation riche en contacts. Les chercheurs se sont demandé pourquoi les approches basées sur la physique ne sont pas aussi efficaces et ont découvert que le lissage était la clé.

Combinaison gagnante
Les chercheurs ont combiné leur modèle avec un algorithme qui peut chercher rapidement et efficacement à travers toutes les décisions possibles. Avec cette combinaison, le temps de calcul a été réduit à environ une minute sur un ordinateur portable standard.
Ils ont testé leur approche sur des tâches telles que le déplacement d’un stylo ou l’ouverture d’une porte. Leur approche basée sur un modèle a obtenu les mêmes performances que l’apprentissage par renforcement, mais en une fraction du temps.
« Les idées qui permettent la manipulation de l’ensemble du corps fonctionnent également pour la planification avec des mains dextres, semblables à celles de l’homme. Auparavant, la plupart des chercheurs affirmaient que l’apprentissage par renforcement était la seule approche adaptée aux mains dextres, mais Terry et Tao ont montré qu’en reprenant cette idée clé de lissage (aléatoire) de l’apprentissage par renforcement, ils pouvaient faire en sorte que des méthodes de planification plus traditionnelles fonctionnent également très bien« , explique l’auteur principal Russ Tedrake.
Cependant, le modèle qu’ils ont développé repose sur une approximation plus simple du monde réel, et ne peut donc pas gérer les mouvements très dynamiques, tels que la chute d’objets. Bien qu’efficace pour les tâches de manipulation plus lentes, leur approche ne permet pas de créer un plan qui permettrait à un robot de jeter une boîte de conserve dans une poubelle, par exemple. Les chercheurs prévoient d’améliorer leur technique pour aborder ces mouvements hautement dynamiques.
« Si vous étudiez attentivement vos modèles et comprenez vraiment le problème que vous essayez de résoudre, vous pouvez certainement réaliser des gains. Il y a des avantages à faire des choses qui vont au-delà de la boîte noire« , conclut M. Suh.
En synthèse
La découverte du MIT ouvre de nouvelles portes dans le domaine de la robotique. En utilisant le lissage, les chercheurs ont créé un moyen plus efficace pour les robots de planifier la manipulation d’objets. Bien qu’il existe encore des limitations, cette approche offre un regard neuf et passionnant sur l’avenir de la robotique.
Pour une meilleure compréhension
Qu’est-ce que le lissage dans l’intelligence artificielle ?
Le lissage est une technique qui résume de nombreux événements de contact en un nombre réduit de décisions, permettant une manipulation plus efficace.
Comment cette découverte peut-elle affecter l’industrie ?
Elle pourrait permettre l’utilisation de robots mobiles plus petits dans les usines, réduisant la consommation d’énergie et les coûts.
Quels sont les défis de cette nouvelle méthode ?
La méthode ne peut pas gérer des mouvements très dynamiques, comme les objets tombants. Les améliorations sont nécessaires pour aborder ces situations.
En quoi cette recherche est-elle différente des méthodes précédentes ?
Elle utilise une technique appelée lissage, qui permet de planifier la manipulation d’objets de manière plus efficace et rapide que les méthodes précédentes.
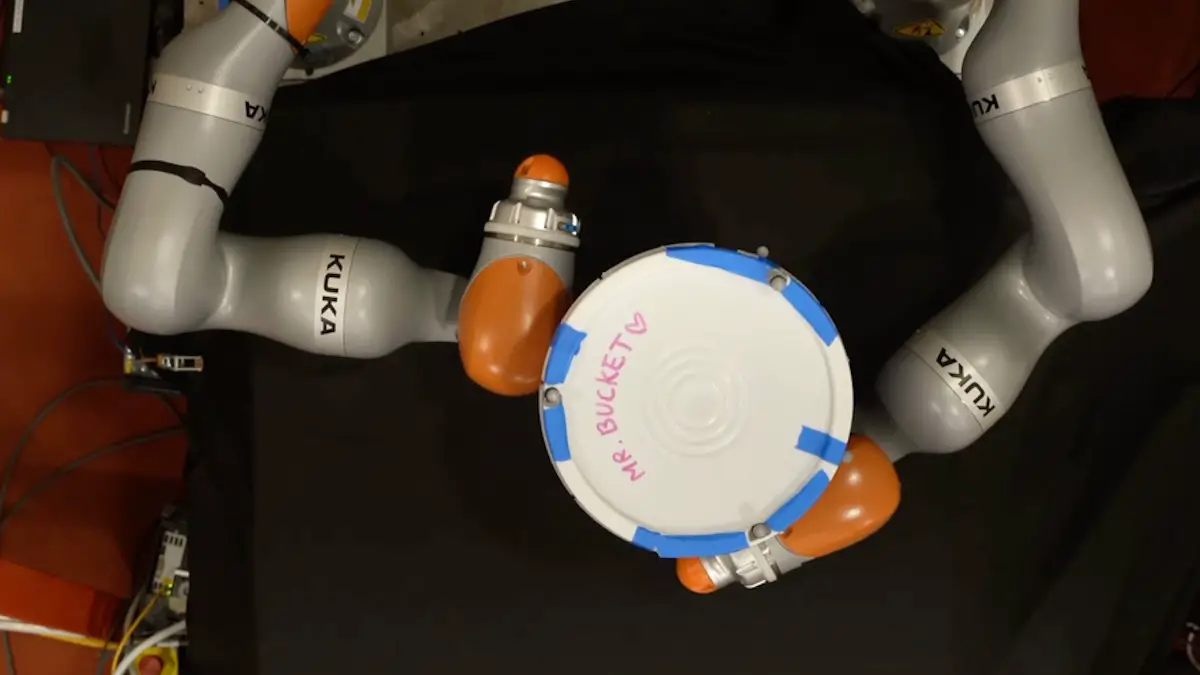
Légende illustration principale : Dans ces figures, un robot simulé effectue trois tâches de manipulation riches en contacts : manipulation d’une balle dans la main, ramassage d’une assiette et manipulation d’un stylo dans une orientation spécifique. Crédit Avec l’aimable autorisation de H.J. Terry Suh, Lujie Yang, Russ Tedrake, et al.
Paper: “Global Planning for Contact-Rich Manipulation via Local Smoothing of Quasi-dynamic Contact Models” : https://ieeexplore.ieee.org/document/10225433 | DOI : 10.1109/TRO.2023.3300230
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.