Des ingénieurs en mécanique de l’Université Duke ont démontré une méthode de preuve de concept pour programmer des propriétés mécaniques dans des blocs de construction solides de type Lego. En contrôlant la solidité de centaines de cellules individuelles selon des motifs spécifiques, cette approche pourrait permettre à la robotique futuriste de modifier ses propriétés mécaniques et ses fonctionnalités à la volée.
Dans leurs tests initiaux, les chercheurs montrent comment une poutre 3D en forme de queue avec différentes configurations peut faire avancer un poisson robotisé dans l’eau selon des trajectoires différentes avec la même activité motrice. L’équipe envisage des versions miniaturisées de la technologie qui pourraient, par exemple, se déplacer dans les vaisseaux sanguins pour évaluer leur santé ou même se reconfigurer pour former un stent adaptatif.
« Nous voulons créer des matériaux qui sont vivants », a expliqué Yun Bai, premier auteur de l’article et doctorant dans le laboratoire de Xiaoyue Ni, professeur adjoint en génie mécanique et science des matériaux à Duke. « Les imprimantes 3D peuvent créer des matériaux avec des propriétés mécaniques spécifiques, mais il faut répéter l’impression pour les changer. Nous voulions créer quelque chose comme les muscles humains qui peuvent modifier leur rigidité en temps réel. »
Pour y parvenir, les chercheurs ont rempli des cellules individuelles avec un mélange de gallium et de fer. À température ambiante, ce composite métallique peut être soit solide, soit liquide. En partant d’un solide complet, les chercheurs peuvent appliquer de la chaleur avec un courant électrique pour liquéfier n’importe quel motif de cellules, presque comme écrire et stocker des 1 et des 0 sur un disque dur.
En deux dimensions, le matériau résultant est essentiellement une feuille mince qui peut être programmée pour modifier précisément la rigidité et l’amortissement sans altérer sa forme ou sa géométrie. Le matériau a été largement testé, montrant une grande flexibilité pour imiter une gamme de matériaux souples disponibles dans le commerce, des plastiques aux caoutchoucs.
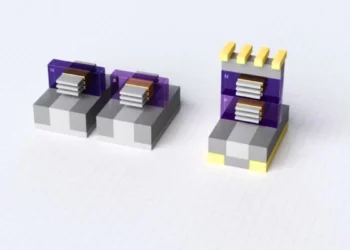
Le concept, cependant, devient encore plus intéressant en trois dimensions. Dans leur démonstration, les chercheurs ont créé des blocs de construction de type Lego qui peuvent être assemblés et désassemblés dans n’importe quelle configuration. Chaque bloc ressemble à un cube de Rubik contenant 27 cellules individuelles, dont chacune peut être liquéfiée par une chaleur localisée provenant d’un signal électrique.
« Cela nous donne la flexibilité de créer des structures 3D avec différentes propriétés mécaniques », a déclaré Bai. « Et congeler les blocs à zéro degré réinitialise toutes les cellules à leur état solide de sorte que leur configuration puisse être reprogrammée encore et encore. »
Dans l’article, les chercheurs ont collé 10 de ces cubes ensemble en une colonne droite pour créer une sorte de queue programmable, l’ont attachée à un moteur simple dans un poisson robotisé et ont testé les capacités de nage de différentes configurations. Le même poisson robotisé avec différents arrangements de cellules solides dans la queue a montré des trajectoires de nage très différentes.
En s’appuyant sur cette plateforme, les chercheurs envisagent d’utiliser différents métaux pour créer différents points de congélation et de fusion qui pourraient permettre à ces matériaux d’être utilisés, par exemple, dans le corps humain. Ils pensent également que le dispositif pourrait être miniaturisé pour fonctionner dans des espaces minuscules tels que les vaisseaux sanguins humains ou des systèmes électroniques délicats.
« Notre objectif est finalement de construire des systèmes plus grands en utilisant les matériaux composites », a affirmé Ni. « Nous voulons construire des matériaux flexibles et programmables pour la robotique qui peuvent leur permettre d’effectuer une grande variété de tâches dans une grande variété d’environnements. »
Article : Digital composites with reprogrammable phase architectures – Journal : Yun Bai, Xuebo Yuan, Yang Weng, Kaiping Yin, Heling Wang, Xiaoyue Ni. – Science Advances – Méthode : Experimental study – DOI : Lien vers l’étude
Source : Duke
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.