Trisha Radulovich
Des chercheurs développent des systèmes robotiques intelligents qui s’adaptent aux schémas d’apprentissage individuels, ce qui pourrait transformer les résultats de la physiothérapie pour les patients à mobilité réduite.
Le chemin vers la guérison pour les survivants d’un AVC qui font leurs premiers pas hésitants ou pour les personnes qui doivent relever les défis quotidiens liés à des troubles de l’équilibre est souvent difficile. Lorsque les gens marchent, leur cerveau et leur corps doivent travailler à l’unisson pour coordonner un processus complexe impliquant plusieurs muscles et articulations afin de rester en équilibre et d’avancer.
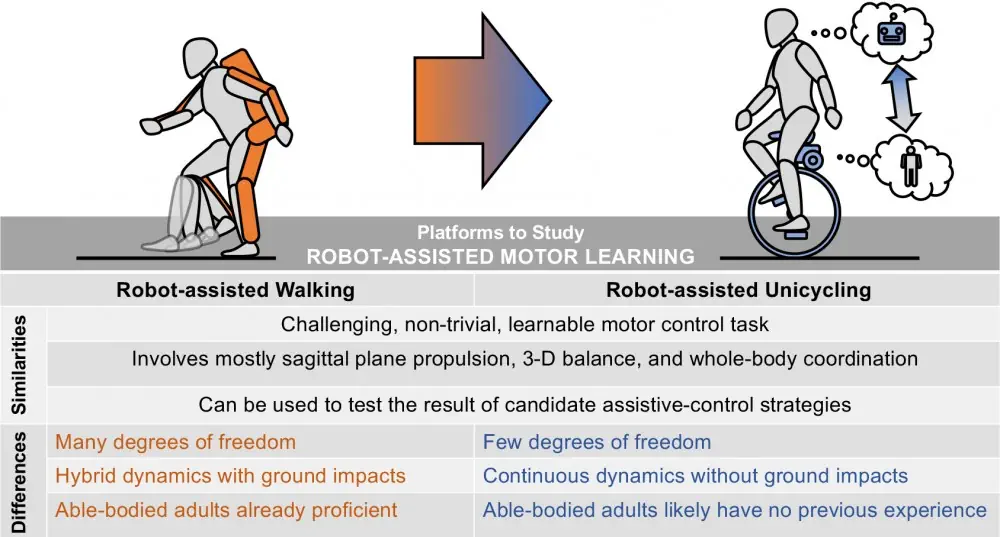
Un nouveau projet de recherche dirigé par Taylor Higgins, professeur adjoint à la faculté d’ingénierie FAMU-FSU, étudiera le processus d’acquisition des compétences motrices en examinant comment les gens apprennent à contrôler une machine où l’équilibre et le mouvement sont constants et cruciaux : le monocycle.
Cette recherche a trois objectifs principaux : étudier comment les humains apprennent à se maintenir en équilibre et à se propulser sur un monocycle ; comparer l’apprentissage humain à l’apprentissage automatique ; et consolider ces résultats dans des dispositifs d’assistance robotisés qui accélèrent la vitesse à laquelle les humains apprennent de nouveaux mouvements.
Les chercheurs souhaitent utiliser le robot monocycle et les algorithmes qui l’accompagnent pour étudier comment les plateformes robotiques peuvent aider les humains à acquérir des compétences, en l’occurrence l’apprentissage de la tâche mécaniquement complexe qui consiste à se maintenir en équilibre et à se propulser vers l’avant. Ces travaux serviront de base à de futures études et à la mise au point d’outils de physiothérapie qui pourraient être utilisés pour aider les patients à réapprendre à marcher.
« Une grande partie de la recherche en robotique d’assistance se concentre sur l’aide aux personnes pour des mouvements qu’elles savent déjà effectuer », précise M. Higgins. « Notre étude se concentrera sur la manière dont les gens acquièrent de nouvelles compétences motrices. Si les robots peuvent aider les personnes en bonne santé à apprendre une tâche plus rapidement, ils peuvent alors être adaptés pour aider les personnes en rééducation à retrouver plus rapidement les compétences perdues. Un apprentissage plus rapide signifie une rééducation plus rapide. »
Ce projet de 799 000 dollars est soutenu par le programme Mind, Machine and Motor Nexus (M3X) de la National Science Foundation.
Le programme M3X qui soutient ce projet finance la recherche fondamentale qui permet aux systèmes intelligents et aux humains d’interagir entre eux. Cette recherche nécessite des technologies de pointe pour collecter des données auprès de l’utilisateur humain et réagir à ces données en adaptant son comportement à la volée. L’objectif est d’améliorer la sécurité, la productivité et le bien-être des personnes qui utilisent l’assistance robotique dans des situations complexes et changeantes.
Comment ça marche ?
La création de modèles mathématiques de la marche est complexe. Le mouvement implique de toucher et de quitter le sol de manière répétée, dans ce que les ingénieurs appellent un système dynamique hybride. En revanche, un monocycle reste en contact avec le sol, ce qui représente un système continu plus facile à modéliser mathématiquement.
« Il est vraiment difficile de faire marcher un robot sur deux jambes », explique M. Higgins. « Le problème est d’autant plus difficile lorsque vous devez guider un humain dans le processus d’apprentissage en même temps. Nous utilisons un modèle mathématique plus simple qui nous permet de nous concentrer davantage sur la manière dont le robot interagit avec l’humain. »
La première étape du projet consiste à étudier comment les sujets apprennent à faire du monocycle sans aide. Au fur et à mesure que les nouveaux cyclistes s’entraînent, l’équipe de recherche utilisera des combinaisons de capture de mouvement pour recueillir des données sur la position de leurs articulations et modéliser mathématiquement leurs mouvements dans l’espace pendant le processus d’apprentissage.
Les chercheurs utiliseront ensuite l’apprentissage par renforcement pour former un « coach robotique » simulé afin de guider un humain simulé dans l’apprentissage du monocycle. Le coach sera récompensé s’il accélère les progrès de l’apprenant. Bien que chaque agent soit simulé, cette partie du projet étudie comment l’apprentissage par renforcement peut faciliter la relation bidirectionnelle entre un coach robotique et un apprenant humain : le coach guide l’apprenant, et les progrès de l’apprenant informent le coach.
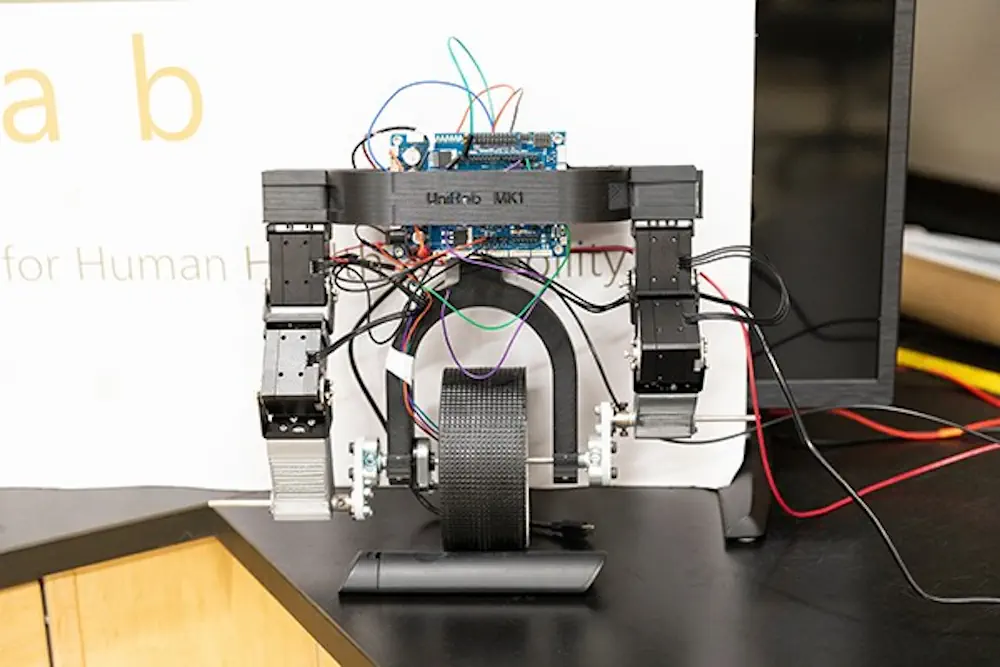
Enfin, l’équipe de Higgins construira un monocycle capable de fournir une assistance robotique et utilisera les stratégies d’apprentissage développées à l’étape deux pour enseigner aux cyclistes novices. Ils étudieront si les entraîneurs robotiques accélèrent le processus d’apprentissage.
L’entraîneur sera assistant : il aidera les apprenants au début, puis réduira son soutien et ajoutera de la résistance à une tâche à mesure que les cyclistes progressent, les aidant ainsi à acquérir et à consolider rapidement cette nouvelle compétence.
Pourquoi c’est important ?
La marche est essentielle pour la santé et l’indépendance. Le projet de monocycle permet aux chercheurs de mieux comprendre comment les gens acquièrent une autre compétence motrice complexe et comment les entraîneurs robotiques pourraient les aider.
Les outils existants pour la rééducation à la marche, tels que les exosquelettes robotiques, sont généralement préprogrammés avec des mouvements ou nécessitent une intervention rudimentaire de la part des patients pour fonctionner. Les recherches de Higgins constituent un pas vers des modèles qui interagissent avec les patients, accélérant et améliorant la rééducation.
L’approche se concentre sur l’indépendance progressive. À mesure que les apprenants progressent, ils ont besoin de moins en moins d’aide robotique.
« Nous ne disposons pas d’algorithmes qui nous indiquent exactement ce que le robot doit faire pour vous aider à apprendre. C’est la pièce manquante », a-t-elle déclaré. « « En simulant des agents robotiques appariés, un « élève » qui apprend sous la direction d’un « coach » , nous pouvons mieux comprendre les mécanismes de l’apprentissage humain et adapter nos technologies afin de mieux répondre aux besoins en matière de rééducation. »
Une collaboration interdisciplinaire
Mme Higgins collabore avec Brady DeCouto, professeur adjoint à la faculté d’éducation, de santé et de sciences humaines Anne Spencer Daves de la FSU, qui étudie le processus d’apprentissage humain indépendamment de l’intervention robotique. Ils travailleront avec Shreyas Kousik, professeur adjoint à Georgia Tech et spécialiste de l’apprentissage automatique pour la robotique et de l’apprentissage par renforcement dans les systèmes d’intelligence artificielle.
Source : FSU
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.