Inspirés par un escargot lent et petit, des scientifiques ont conçu un prototype de robot qui pourrait un jour ramasser les microplastiques à la surface des océans, des mers et des lacs.
Le design du robot est basé sur l’escargot de l’aquarium hawaïen (Pomacea canaliculate), un escargot commun qui utilise le mouvement ondulant de son pied pour entraîner le flux de surface de l’eau et aspirer les particules de nourriture flottantes.
Sunny Jung, professeur d’ingénierie biologique et environnementale à l’Université de Cornell, et les coauteurs de l’étude, Jisoo Yuk, Chris Roh et Yicong Fu, ont observé une démonstration de leur robot inspiré par l’escargot.
Un besoin urgent de solutions pour les microplastiques
Actuellement, les dispositifs de collecte de plastique s’appuient principalement sur des filets de traîne ou des tapis roulants pour rassembler et éliminer les débris de plastique plus grands de l’eau, mais ils manquent de la finesse nécessaire pour récupérer les microplastiques.
Ces minuscules particules de plastique peuvent être ingérées et finir dans les tissus des animaux marins, entrant ainsi dans la chaîne alimentaire où elles deviennent un problème de santé et potentiellement cancérigènes pour les humains.
Les déchets plastiques représentent 80% de toute la pollution marine, avec 8 à 10 millions de tonnes de plastique qui finissent dans l’océan chaque année, selon le Conseil économique et social des Nations Unies.
Un prototype prometteur
« Nous avons été inspirés par la façon dont cet escargot collecte les particules de nourriture à l’interface [eau et air] pour concevoir un dispositif qui pourrait éventuellement collecter les microplastiques dans l’océan ou à la surface d’un corps d’eau », a indiqué Sunghwan Jung, professeur et directeur des études supérieures au Département d’ingénierie biologique et environnementale du Collège d’agriculture et de sciences de la vie (CALS).
Jung est l’auteur principal d’une étude, « Optimal free-surface pumping by an undulating carpet », qui a été publiée dans Nature Communications.
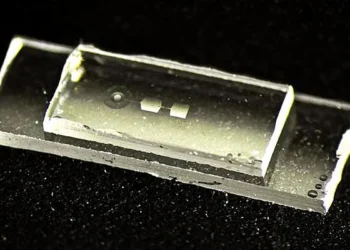
Le prototype, modifié à partir d’un design existant, devrait être mis à l’échelle pour être pratique dans un contexte réel. Les chercheurs ont utilisé une imprimante 3D pour fabriquer une feuille flexible en forme de tapis capable d’onduler.
Une structure hélicoïdale sur la face inférieure de la feuille tourne comme un tire-bouchon pour faire onduler le tapis et créer une vague de déplacement sur l’eau.

Une efficacité énergétique remarquable
L’analyse du mouvement du fluide a été la clé de cette recherche.
« Nous devions comprendre le flux de fluide pour caractériser le comportement de pompage », a ajouté Sunny Jung. Le système de pompage de fluide basé sur la technique de l’escargot est ouvert à l’air. Les chercheurs ont calculé qu’un système fermé similaire, où la pompe est enfermée et utilise un tube pour aspirer l’eau et les particules, nécessiterait des apports énergétiques élevés pour fonctionner.
En revanche, le système ouvert à la manière de l’escargot est beaucoup plus efficace. Par exemple, le prototype, bien que petit, fonctionne avec seulement 5 volts d’électricité tout en aspirant efficacement l’eau, a déclaré Jung.
Des défis à relever
En raison du poids d’une batterie et d’un moteur, les chercheurs pourraient avoir besoin d’attacher un dispositif de flottaison au robot pour l’empêcher de couler, a déclaré Jung.
Anupam Pandey, ancien chercheur postdoctoral dans le laboratoire de Jung, actuellement professeur adjoint de génie mécanique à l’Université de Syracuse, est le premier auteur de l’article.
En synthèse
Ce prototype de robot inspiré par l’escargot hawaïen pourrait représenter une solution prometteuse pour le nettoyage des microplastiques dans les océans. Bien qu’il reste des défis à relever, notamment en termes de mise à l’échelle et d’alimentation énergétique, les premiers résultats sont encourageants. L’innovation s’inspire de la nature pour proposer des solutions durables et efficaces à l’un des plus grands défis environnementaux de notre époque.
Pour une meilleure compréhension
Qu’est-ce que le microplastique ?
Les microplastiques sont de minuscules particules de plastique, généralement de moins de 5mm, qui peuvent être ingérées par les animaux marins et finir dans la chaîne alimentaire.
Comment le robot fonctionne-t-il ?
Le robot utilise une feuille flexible qui ondule pour créer une vague de déplacement sur l’eau, simulant le mouvement d’un escargot. Cette action permet d’aspirer les particules de microplastique.
Quels sont les avantages de ce robot ?
Le robot est économe en énergie, fonctionnant avec seulement 5 volts d’électricité. De plus, il est capable de collecter des microplastiques, une tâche que les méthodes actuelles de collecte de plastique ne peuvent pas accomplir efficacement.
Quels sont les défis à relever ?
Le robot doit être mis à l’échelle pour être utilisé dans un contexte réel. De plus, en raison du poids de la batterie et du moteur, un dispositif de flottaison peut être nécessaire pour empêcher le robot de couler.
Qui sont les chercheurs derrière ce projet ?
Le projet est dirigé par Sunny Jung, professeur d’ingénierie biologique et environnementale, avec la participation de plusieurs coauteurs de différentes universités.
Référence
Les coauteurs comprennent Chris Roh, professeur adjoint d’ingénierie biologique et environnementale (CALS) ; Jisoo Yuk, Ph.D. ’20, ancien étudiant diplômé dans le laboratoire de Jung ; Daisuke Takagi, professeur associé de mathématiques à l’Université de Hawaii ; et Sungyon Lee, professeur associé de génie mécanique à l’Université du Minnesota.
Jung, S., Yuk, J., Roh, C., Fu, Y., Takagi, D., & Lee, S. (2023). Optimal free-surface pumping by an undulating carpet. Nature Communications.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.