Une intelligence artificielle bat les champions du monde de courses de drones, une prouesse technologique qui semblait inatteignable il y a quelques années à peine. Le système d’IA « Swift », conçu par des chercheurs suisses de l’UZH, a piloté un drone dans un environnement simulé avant de remporter des courses contre des champions humains.
Des applications concrètes sont envisageables dans la surveillance environnementale ou les interventions d’urgence.
Un jalon historique dans le développement de l’IA
On se souvient de la victoire d’IBM Deep Blue contre le champion d’échecs Garry Kasparov en 1996, ou plus récemment d’AlphaGo de Google qui a écrasé le numéro un mondial du jeu de Go, bien plus complexe, Lee Sedol, en 2016. Ces compétitions où les machines ont pris le dessus sur les champions humains sont des étapes clés dans l’histoire de l’intelligence artificielle.
Désormais, des chercheurs de l’Université de Zurich et d’Intel franchissent un nouveau cap avec le premier système autonome capable de battre des champions humains dans un sport physique : les courses de drones.
Apprentissage dans le monde physique
Le système d’IA, baptisé Swift, a remporté plusieurs courses contre trois champions mondiaux de drone racing en immersion, où les pilotes contrôlent à distance des quadricoptères filant à plus de 100 km/h grâce à un casque relié à une caméra embarquée.
« Les sports physiques sont plus difficiles pour l’IA car ils sont moins prévisibles que les jeux de plateau ou vidéo. Nous n’avons pas une connaissance parfaite des modèles du drone et de l’environnement, l’IA doit donc les apprendre en interagissant avec le monde physique », explique Davide Scaramuzza, chef du groupe de robotique et perception de l’Université de Zurich – et nouveau capitaine d’équipe de drone racing.
Entraînement dans un environnement de simulation optimisé
Swift a été entraîné dans un environnement simulé où il a appris à voler par essais et erreurs grâce à l’apprentissage par renforcement. L’utilisation de la simulation a permis d’éviter de détruire de multiples drones lors des premiers apprentissages, souvent synonymes de crashs.
« Pour que les conséquences des actions dans le simulateur se rapprochent le plus possible de celles du monde réel, nous avons conçu une méthode pour optimiser le simulateur avec des données réelles« , explique Elia Kaufmann, auteur principal de l’étude.
Dans cette phase, le drone a volé de façon autonome grâce à des positions très précises fournies par un système de positionnement externe, tout en enregistrant les données de sa caméra embarquée. Il a ainsi appris à autocorriger les erreurs d’interprétation des capteurs embarqués.
Les pilotes humains s’adaptent encore mieux aux conditions changeantes
Après un mois de vol simulé, soit moins d’une heure sur un PC de bureau, Swift était prêt à défier ses concurrents humains : le champion 2019 de la Drone Racing League Alex Vanover, le champion 2019 MultiGP Drone Racing Thomas Bitmatta, et le triple champion suisse Marvin Schaepper.
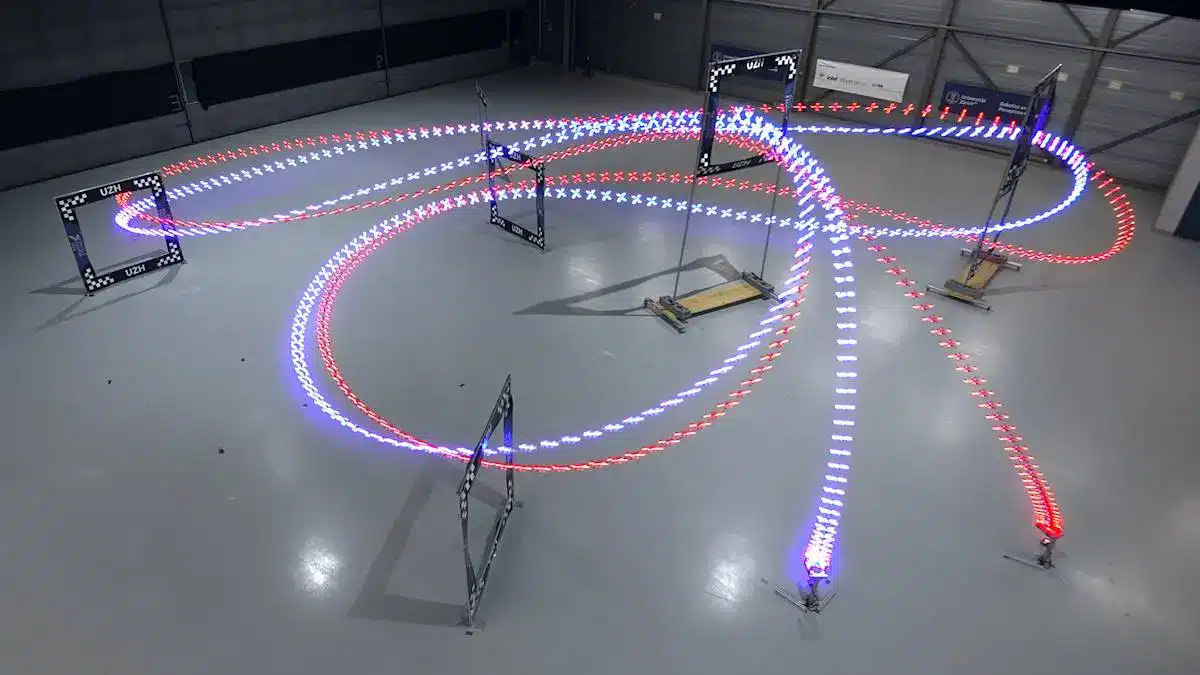
Les courses se sont déroulées du 5 au 13 juin 2022, sur une piste construite pour l’occasion dans un hangar de l’aéroport de Dübendorf, près de Zurich. Le circuit couvrait une surface de 25 m sur 25 m, avec sept portes carrées à franchir dans le bon ordre pour boucler un tour, incluant des manœuvres acrobatiques comme un Split-S à pleine vitesse.
Dans l’ensemble, Swift a réalisé le meilleur tour, avec une demi-seconde d’avance sur le meilleur tour humain. En revanche, les pilotes humains se sont montrés plus adaptables que le drone autonome, qui a échoué lorsque les conditions différaient de son entraînement, par exemple en cas de luminosité trop importante.

« Repousser les limites du vol autonome est crucial bien au-delà des courses de drones« , souligne Davide Scaramuzza. « Les drones ont une autonomie limitée, ils consomment l’essentiel de leur énergie juste pour rester en vol. En volant plus vite, nous augmentons donc leur utilité. »
Dans des applications comme la surveillance forestière ou l’exploration spatiale, la vitesse est primordiale pour couvrir de grandes distances en peu de temps. Dans l’industrie du cinéma, des drones autonomes ultra-rapides pourraient être employés pour des cascades. Et en intervention d’urgence, des drones de secours capables d’atteindre des vitesses élevées pourraient faire une énorme différence à l’intérieur d’un bâtiment en feu.
En synthèse
La victoire du système d’IA Swift sur des champions humains de courses de drones marque une avancée technologique majeure. Bien que l’IA ait encore des progrès à faire en termes d’adaptabilité face à des conditions changeantes, cette prouesse ouvre la voie à de nombreuses applications concrètes des drones autonomes rapides, dans des domaines comme la surveillance environnementale, les interventions d’urgence ou l’industrie du cinéma.
Pour une meilleure compréhension
En quoi cette victoire d’une IA est-elle historique ?
Elle constitue la première victoire d’une IA contre des champions humains dans un sport physique, les courses de drones, après des succès dans des jeux intellectuels comme les échecs ou le go.
Comment l’IA Swift a-t-elle appris à piloter des drones ?
Grâce à un entraînement dans un simulateur optimisé avec des données réelles, en utilisant l’apprentissage par renforcement pour apprendre par essais-erreurs.
Quels sont les points forts et faiblesses de Swift ?
Swift vole très vite et a battu les temps des champions humains. Mais il est moins adaptable face à des conditions différentes de son entraînement.
Quelles applications concrètes pour les drones autonomes rapides ?
Surveillance environnementale, interventions d’urgence, exploration spatiale, cinéma…
Pourquoi la vitesse est-elle importante pour les drones ?
Pour couvrir de grandes distances avec leur autonomie limitée, et augmenter leur utilité dans des applications critiques.
Légende illustration principale : Le drone autonome entraîné par l’IA (en bleu) a réalisé le tour le plus rapide, avec une demi-seconde d’avance sur le meilleur temps d’un pilote humain. (Image : UZH / Leonard Bauersfeld)
Références : Elia Kaufmann, Leonard Bauersfeld, Antonio Loquercio, Matthias Müller, Vladlen Koltun, Davide Scaramuzza: Champion-Level Drone Racing using Deep Reinforcement Learning. Nature. 31 August 2023. DOI: 10.1038/s41586-023-06419-4
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.