Des chercheurs ont mis au point une technique qui modélise géométriquement des objets organiques et crée des images photoréalistes en trois dimensions (3D) de ces objets. Ces images mathématiquement précises peuvent être utilisées pour concevoir des systèmes robotiques capables d’identifier et de trier ces formes complexes de manière autonome.
Cette technique a été créée pour améliorer les systèmes robotiques qui trient et identifient les fossiles marins microscopiques utilisés dans la recherche climatique, mais elle pourrait servir de modèle pour des applications dans divers autres domaines.
« Nous avons démontré la fonctionnalité de cette technique de deux manières : dans un système robotique pour l’imagerie 3D de ces fossiles marins microscopiques et dans un système robotique pour l’identification des fossiles », indique Edgar Lobaton, coauteur d’un article sur ces travaux et professeur d’ingénierie électrique et informatique à l’université d’État de Caroline du Nord. « L’identification de ces fossiles est très difficile, ce qui nous a amenés à mener ces travaux. »
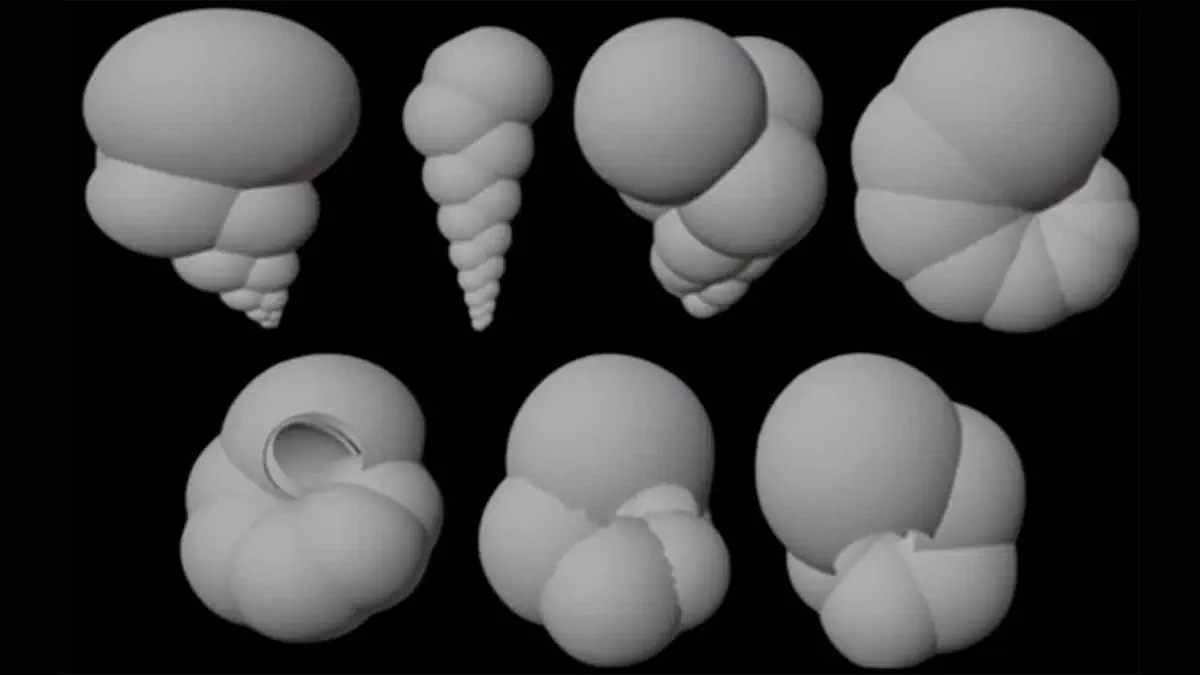
Il s’agit des foraminifères, ou forams, qui sont présents dans les océans de la Terre depuis plus de 100 millions d’années. Les forams sont des protistes, ni végétaux ni animaux, qui laissent derrière eux de minuscules coquilles lorsqu’ils meurent. Ces coquilles permettent aux scientifiques de mieux comprendre les caractéristiques des océans à l’époque où les forams étaient vivants. Par exemple, différents types d’espèces de forams prospèrent dans différents types d’environnements océaniques, et les mesures chimiques peuvent renseigner les scientifiques sur tout, de la chimie de l’océan à sa température au moment de la formation de la coquille.
Cependant, l’évaluation des coquilles et des fossiles de forams est à la fois fastidieuse et chronophage : imaginez trier des centaines d’objets de forme similaire mesurant moins d’un millimètre de large. C’est pourquoi les chercheurs en paléontologie souhaitent automatiser ce processus. Et la nature du défi a suscité l’intérêt de M. Lobaton.
« Nous avions déjà développé un système robotique entièrement fonctionnel pour identifier et trier les foraminifères, appelé Forabot », ajoute M. Lobaton. « La création de Forabot nous a appris que l’aspect le plus chronophage du processus est le réglage fin du matériel et de sa disposition. Quelle doit être la taille de chaque composant ? Quelle est la meilleure configuration des composants ? Il existe un million de variations que vous pouvez modifier. Le travail que nous partageons ici a été développé spécifiquement pour relever ce défi, car nous voulions trouver un moyen plus efficace d’améliorer Forabot. »
En capturant des fac-similés 3D de ces fossiles avec une précision incroyable, les chercheurs peuvent utiliser ces fac-similés dans des simulations du système robotique.
« Il est beaucoup plus facile d’effectuer des ajustements dans la simulation que lorsque l’on travaille avec du matériel réel », explique M. Lobaton. « Et une fois que vous avez optimisé la configuration du système dans la simulation, le processus de réglage du matériel dans le monde réel est beaucoup plus facile, car vous savez déjà comment il doit être configuré. »
Pour ce travail, les chercheurs ont modifié un modèle mathématique afin qu’il puisse produire des fac-similés 3D détaillés des fossiles. L’équipe de M. Lobaton a ensuite travaillé avec un paléontologue pour s’assurer que les fac-similés correspondaient aux caractéristiques de sept espèces représentatives de foraminifères.
Les chercheurs se sont ensuite tournés vers une simulation de Forabot. En utilisant les fac-similés 3D nouvellement capturés pour explorer les modifications apportées au système de Forabot, les chercheurs ont pu améliorer sa précision de 82 % à 89 %, sans avoir à passer par le processus fastidieux de reconfiguration répétée du matériel dans leur laboratoire.
« Grâce à notre ensemble de données synthétiques, nous avons pu tester la capacité des modèles d’IA de pointe à reconstruire des formes 3D à partir d’un ensemble clairsemé d’images 2D », déclare Sanjana Banerjee, auteur correspondant de l’article et doctorant à la NC State. « Ces simulations nous ont aidés à comprendre les meilleures conditions d’imagerie et guident désormais le développement d’un nouveau système robotique axé sur la reconstruction 3D, une étape essentielle vers une automatisation accrue de l’identification de ces microfossiles. »
« Nos travaux constituent une base solide pour l’étude de la croissance et de la morphologie d’un large éventail d’espèces de foraminifères », commente Mme Banerjee. « Il permet également de relever les principaux défis de la micropaléontologie, tels que la disponibilité limitée des données et la restitution précise des formes. »
« Plus largement, l’approche que nous avons adoptée ici pourrait être utilisée pour développer ou optimiser tout système robotique qui identifie ou trie des objets de formes complexes », conclut M. Lobaton. « Les cas d’utilisation potentiels comprennent l’isolement de microbes et d’agents pathogènes à l’échelle microscopique et le tri de produits agricoles à plus grande échelle. »
Les chercheurs ont mis la base de code utilisée dans ce travail en open source, afin que d’autres chercheurs puissent l’utiliser. Elle est disponible à l’adresse suivante : https://github.com/ARoS-NCSU/Forams-3DGeneration
L’article, intitulé « Foram3D : A Pipeline for 3D Synthetic Data Generation and Rendering of Foraminifera for Image Analysis and Reconstruction, est publié en libre accès dans la revue Marine Micropaleontology. L’article a été cosigné par Turner Richmond, ancien doctorant à NC State, Michael Daniele, professeur agrégé d’ingénierie électrique et informatique à NC State, et Thomas Marchitto, professeur de sciences géologiques à l’université du Colorado, à Boulder.
DOI: 10.1016/j.marmicro.2025.102486
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.