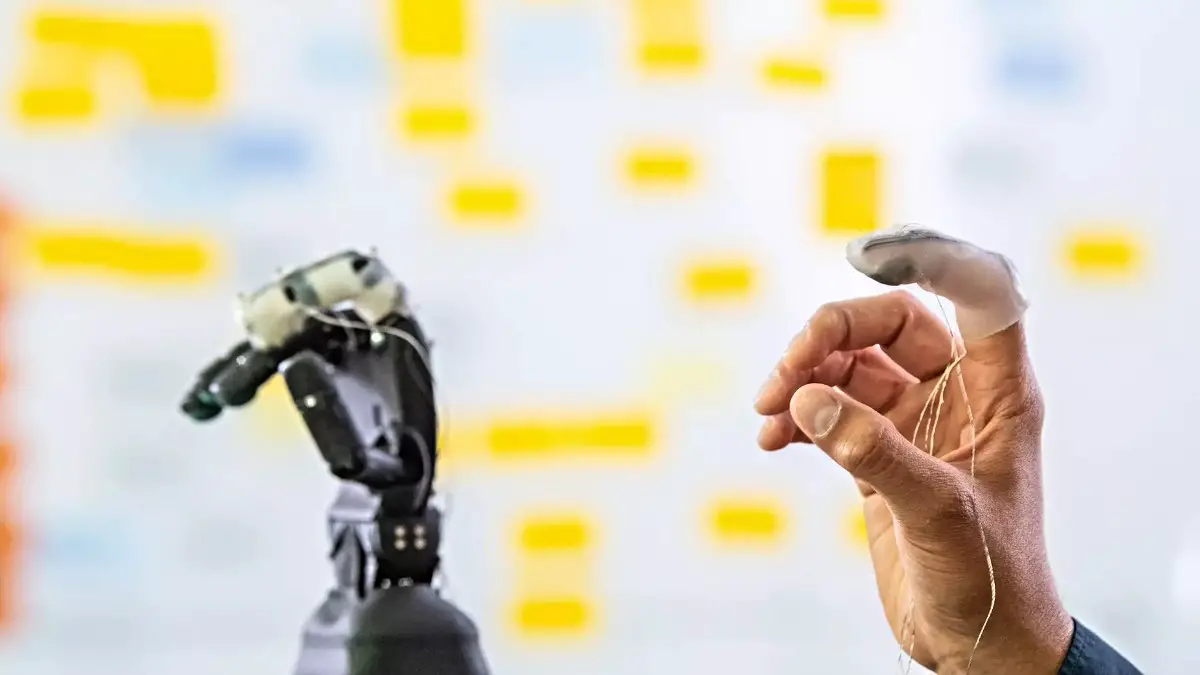
Les chercheurs de l’Institut de Robotique et d’Intelligence Machine de Munich (MIRMI) à l’Université Technique de Munich (TUM) établissent une étape majeure dans le domaine de la robotique et des prothèses. Ils ont réussi à développer un processus automatique de fabrication de capteurs souples, ouvrant la voie à une interaction plus sophistiquée et plus sensible entre les machines et leur environnement.
Selon Sonja Groß, chercheuse à l’MIRMI, « détecter et percevoir notre environnement est essentiel pour comprendre comment interagir efficacement avec lui« . Les propriétés physiques des objets, comme leur forme, leur dureté et leur flexibilité, influencent la manière dont nous pouvons les saisir et les manipuler.
L’interaction avec le système robotique
Dans la robotique et les prothèses, l’objectif suprême est de reproduire le plus fidèlement possible les compétences sensorimotrices d’une personne. Les capteurs de force et de couple sont pleinement intégrés dans la plupart des dispositifs. Cependant, les capteurs traditionnels ont été limités en termes de possibilités de personnalisation et ne peuvent être attachés à des objets arbitraires.
Un nouveau cadre pour les capteurs souples
Ce constat a mené à l’innovation présentée par Sonja Groß et Diego Hidalgo à la conférence ICRA de Londres. Ils ont introduit un matériau doux et semblable à la peau qui enveloppe les objets. En outre, le groupe de recherche a développé un cadre qui automatise largement le processus de production de cette peau.
Production de capteurs souples
Le processus se déroule ainsi : « Nous utilisons un logiciel pour construire la structure pour les systèmes sensoriels », explique Hidalgo. « Nous envoyons ensuite ces informations à une imprimante 3D qui fabrique nos capteurs souples« . Ces capteurs, intégrés dans du silicone, s’adaptent à la surface en question tout en fournissant des données précises utilisables pour l’interaction avec l’environnement.
Nouvelles perspectives pour la robotique et les prothèses
« L’intégration de ces capteurs souples et similaires à la peau dans des objets 3D ouvre de nouvelles voies pour la détection haptique avancée dans l’intelligence artificielle« , affirme le Prof. Sami Haddadin, directeur exécutif de l’MIRMI. Ces capteurs fournissent des données précieuses sur les forces de compression et les déformations en temps réel, ce qui élargit la gamme de perception d’un objet ou d’une main robotique.
En synthèse
Cette nouvelle technologie développée par l’Institut de Robotique et d’Intelligence Machine de Munich est une véritable progression dans le domaine de la robotique et des prothèses. Avec la production de capteurs souples enveloppant les objets, elle permet une interaction plus sophistiquée et plus sensible avec l’environnement, marquant une étape significative dans la façon dont nous comprenons et interagissons avec le monde autour de nous.
S. Groß, D. Hidalgo, S. Breimann, N. Stein, A. Ganguly, D. Naceri, S. Haddadin ; Soft Sensing Skin for Arbitrary Objects : An Automatic Framework, IEEE International Conference on Robotics and Automation (ICRA), 2023
La recherche a été publiée dans « Soft Sensing Skins for Arbitrary Objects : An Automatic Framework«