Le KAIST (Institut avancé des sciences et technologies de Corée) a annoncé le développement d’un robot quadrupède capable de se déplacer rapidement sur les murs et plafonds en acier.
Ce robot, nommé M.A.R.V.E.L., est une innovation inédite dans le domaine de la robotique et pourrait révolutionner les inspections, réparations et la maintenance de grandes structures en acier.
Un robot quadrupède aux capacités impressionnantes
Le robot M.A.R.V.E.L. (Magnetically Adhesive Robot for Versatile and Expeditious Locomotion) a été développé par une équipe de recherche dirigée par le professeur Hae-Won Park du département de génie mécanique du KAIST. Ce robot est capable de se déplacer à grande vitesse sur des surfaces ferromagnétiques grâce à des semelles spécialement conçues, utilisant un électro-aimant permanent (EPM) et un élastomère magnéto-rhéologique (MRE).
Les EPM permettent de contrôler rapidement l’adhérence magnétique, tandis que les MRE assurent une adhérence même sur des surfaces irrégulières. Ces technologies ont été combinées pour créer des semelles légères et performantes, capables de supporter des forces verticales de 54,5 kg et des forces horizontales de 45,4 kg.

Des performances inégalées pour un robot grimpeur
M.A.R.V.E.L. peut grimper à une vitesse de 70 cm par seconde sur des murs verticaux et se déplacer à une vitesse maximale de 50 cm par seconde lorsqu’il est suspendu à l’envers sous un plafond. Il s’agit de la vitesse la plus rapide jamais enregistrée pour un robot grimpeur quadrupède. De plus, le robot a démontré sa capacité à se déplacer sur des surfaces peintes, poussiéreuses et rouillées, ainsi qu’à franchir des obstacles de 5 cm de hauteur sans difficulté.
Ces performances font de M.A.R.V.E.L. un outil prometteur pour l’inspection, la réparation et la maintenance de grandes structures en acier telles que les navires, les ponts, les pylônes électriques, les pipelines, les zones de stockage et les chantiers de construction.
En synthèse
Le robot M.A.R.V.E.L. représente une avancée majeure dans le domaine de la robotique et pourrait transformer la manière dont les inspections, réparations et la maintenance de grandes structures en acier sont effectuées. Grâce à ses semelles innovantes et à sa vitesse de déplacement impressionnante, ce robot quadrupède offre des performances inégalées et ouvre la voie à de nouvelles applications dans divers secteurs industriels.
Pour une meilleure compréhension
Qu’est-ce que M.A.R.V.E.L. ?
M.A.R.V.E.L. est un robot quadrupède développé par le KAIST, capable de se déplacer rapidement sur des murs et plafonds en acier grâce à des semelles magnétiques spécialement conçues.
Comment fonctionnent les semelles de M.A.R.V.E.L. ?
Les semelles de M.A.R.V.E.L. utilisent un électro-aimant permanent (EPM) pour contrôler rapidement l’adhérence magnétique et un élastomère magnéto-rhéologique (MRE) pour assurer une adhérence même sur des surfaces irrégulières.
Quelles sont les performances de M.A.R.V.E.L. ?
M.A.R.V.E.L. peut grimper à une vitesse de 70 cm par seconde sur des murs verticaux et se déplacer à une vitesse maximale de 50 cm par seconde lorsqu’il est suspendu à l’envers sous un plafond. Il peut également franchir des obstacles de 5 cm de hauteur sans difficulté.
Quelles sont les applications potentielles de M.A.R.V.E.L. ?
M.A.R.V.E.L. pourrait être utilisé pour l’inspection, la réparation et la maintenance de grandes structures en acier telles que les navires, les ponts, les pylônes électriques, les pipelines, les zones de stockage et les chantiers de construction.
Quelle est l’importance de cette innovation ?
Le robot M.A.R.V.E.L. représente une avancée majeure dans le domaine de la robotique et pourrait transformer la manière dont les inspections, réparations et la maintenance de grandes structures en acier sont effectuées, en offrant des performances inégalées et en ouvrant la voie à de nouvelles applications dans divers secteurs industriels.
Article « Agile and Versatile Climbing on Ferromagnetic Surfaces with a Quadrupedal Robot » (escalade agile et polyvalente sur des surfaces ferromagnétiques avec un robot quadrupède). (DOI: 10.1126/scirobotics.add1017)
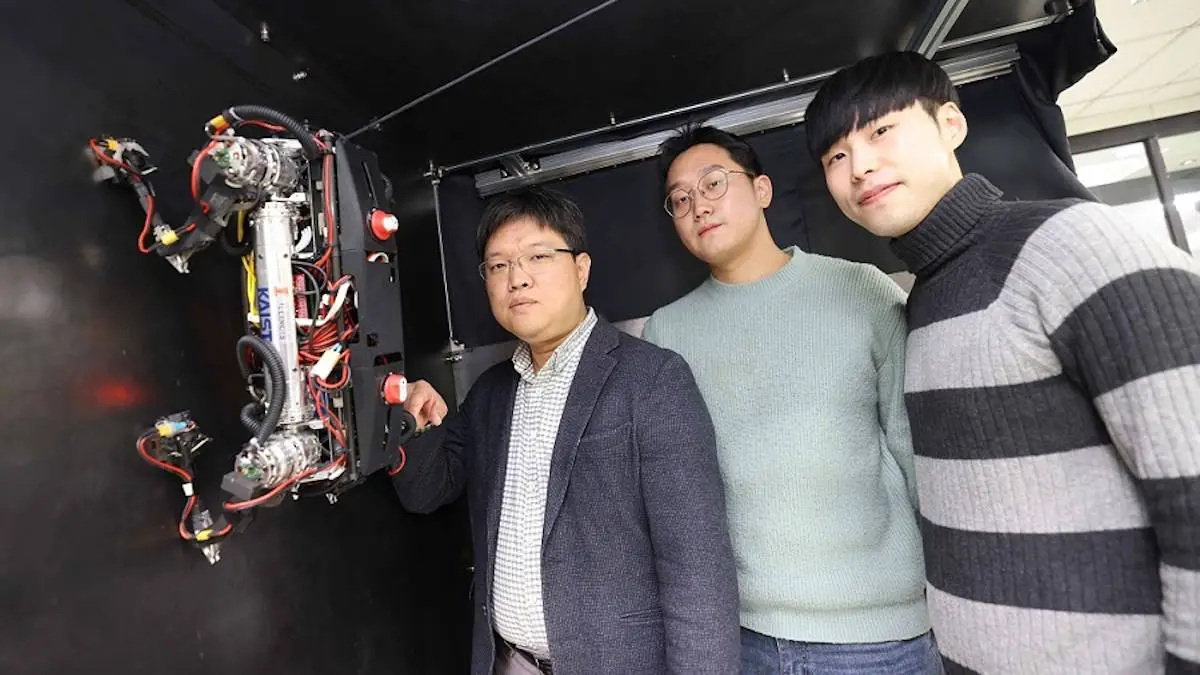
Légende illustration principale : De gauche à droite) KAIST ME Prof. Hae-Won Park, Doctorant Yong Um, Doctorant Seungwoo Hong