Une récente innovation dans le domaine des capteurs électro-myographiques (EMG) ouvre de nouvelles perspectives pour le contrôle des robots portables utilisés dans la réhabilitation.
Les robots portables sont des dispositifs utilisés dans le cadre de divers traitements de rééducation pour les personnes âgées et les patients se remettant d’un accident vasculaire cérébral ou d’un traumatisme.
Une équipe de recherche coréenne a annoncé fin janvier avoir développé avec succès un capteur à micro-aiguilles extensible et adhésif. Ce capteur a la capacité de détecter électriquement les signaux physiologiques à un niveau élevé sans être affecté par l’état de la peau de l’utilisateur.
Les capteurs électrophysiologiques portables actuels présentent souvent une qualité de signal qui se détériore avec le temps et sont grandement affectés par les conditions de la peau de l’utilisateur. La nouvelle technologie utilise un substrat conducteur extensible et adhésif intégré à des réseaux de micro-aiguilles, permettant des mesures EMG de longue durée et de haute qualité.
Vers une Application Pratique
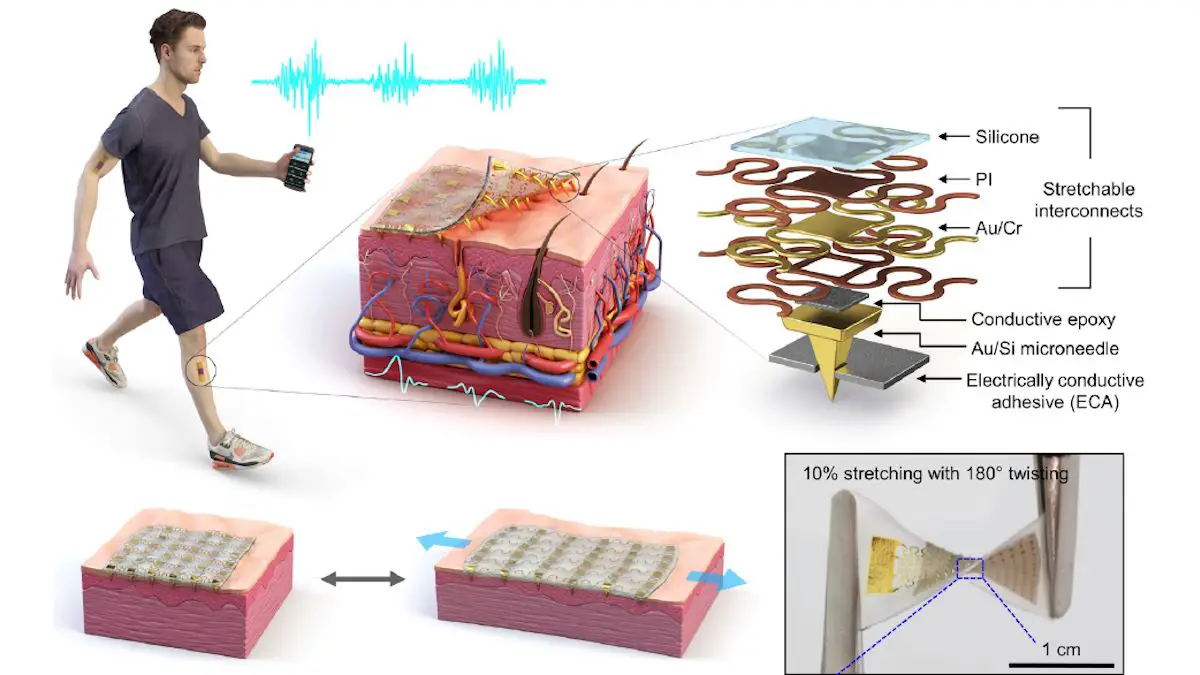
L’équipe de recherche a créé un capteur à micro-aiguilles extensible et adhésif en intégrant des micro-aiguilles dans un substrat en polymère de silicone souple.
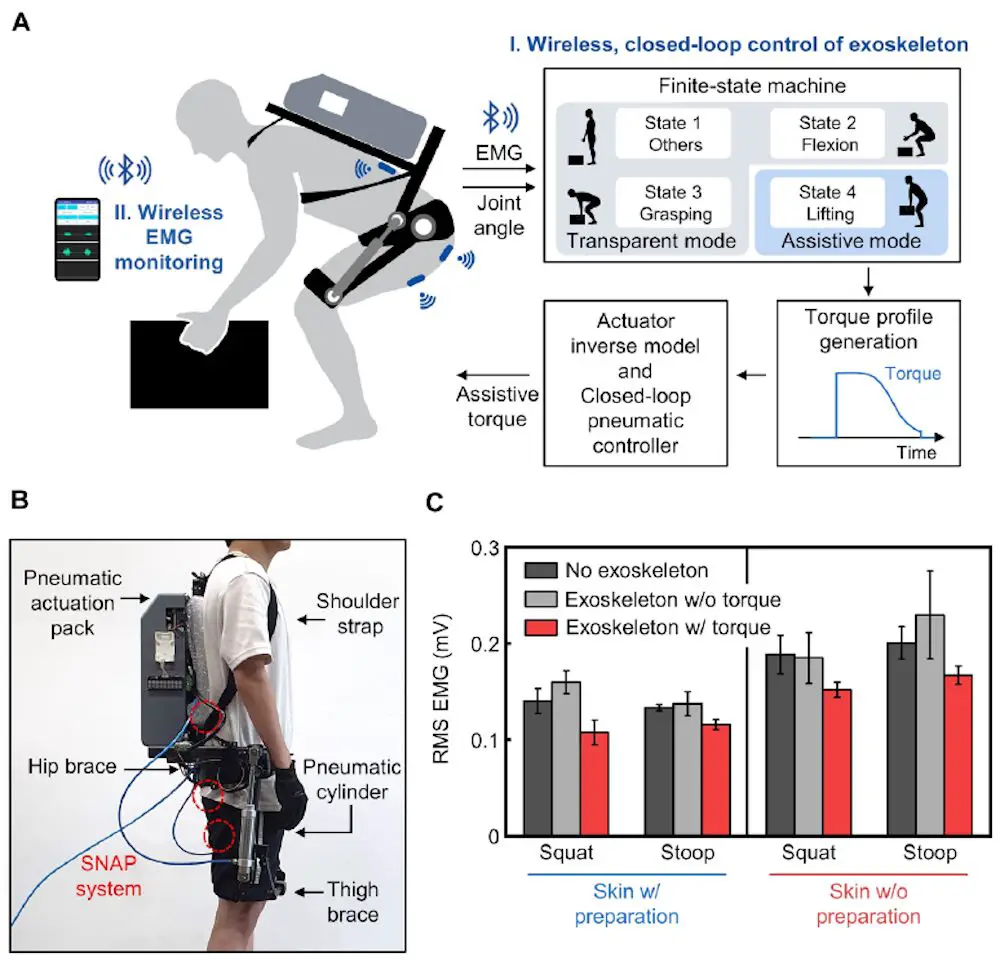
Pour vérifier l’utilité du nouveau patch, l’équipe de recherche a mené une expérience d’assistance au mouvement à l’aide d’un robot portable. Ils ont fixé le patch à micro-aiguilles sur la jambe d’un utilisateur, où il a pu détecter les signaux électriques générés par le muscle. Le capteur a ensuite envoyé l’intention détectée à un robot portable, ce qui a permis à ce dernier d’aider l’utilisateur à soulever plus facilement un objet lourd.
Le professeur Jae-Woong Jung de l’École d’Ingénierie Électrique (EE) du KAIST qui a dirigé la recherche, a expliqué : « Le capteur à micro-aiguilles extensible et adhésif mis au point peut détecter de manière stable les signaux EMG sans être affecté par l’état de la peau de l’utilisateur. Grâce à cela, nous pourrons contrôler des robots portables avec une précision et une stabilité accrues, ce qui contribuera à la rééducation des patients utilisant des robots.«
En synthèse
Le capteur à micro-aiguilles développé promet un contrôle plus précis et stable des robots portables, ouvrant la voie à une réhabilitation améliorée pour les patients. Cette technologie représente un pas significatif vers l’intégration harmonieuse des dispositifs portables dans les traitements de réhabilitation.
Pour une meilleure compréhension
Qu’est-ce qu’un capteur EMG ?
Un capteur électromyographique (EMG) est un dispositif capable de détecter les signaux électriques générés par les muscles lorsqu’ils sont activés.
Comment fonctionne le capteur à microneedles ?
Le capteur intègre des micro-aiguilles dans un substrat souple, permettant une pénétration à travers la couche cornée de la peau sans inconfort, pour une détection fiable des signaux électrophysiologiques.
Quels sont les avantages de cette nouvelle technologie ?
Elle permet des mesures EMG de longue durée et de haute qualité, indépendamment des conditions de la peau de l’utilisateur, et sans préparation préalable de la peau.
Quel est le potentiel d’application de cette technologie ?
Elle a un potentiel significatif dans le domaine de la réhabilitation, permettant un contrôle plus précis et stable des robots portables pour aider les patients.
Quels sont les soutiens de cette recherche ?
Cette recherche a été soutenue par le projet de développement de la technologie intégrée de capteurs bio-signaux de la Fondation Nationale de Recherche de Corée, le projet de développement de la technologie médicinale électronique, et le projet BK21 étape 4.
Références
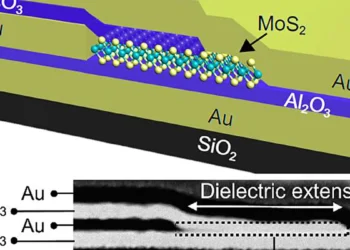
Légende illustration :
Conception et fonctionnement du patch adhésif extensible à micro-aiguille (SNAP). (A) Illustration schématique montrant la configuration globale du système et l’application du SNAP. (B) Vue éclatée du schéma d’un SNAP, composé d’interconnexions serpentines extensibles, d’une micro-aiguille de Si recouverte d’Au et d’un ECA composé de flocons d’Ag et de silicone. (C) Images optiques montrant la conformité mécanique élevée de la SNAP.
Les résultats de cette recherche, rédigés par les coauteurs Heesoo Kim et Juhyun Lee, tous deux candidats au doctorat à l’école d’EE du KAIST, ont été publiés dans Science Advances le 17 janvier sous le titre « Skin-preparation-free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control » (Patchs adhésifs à micro-aiguilles extensibles sans préparation de la peau pour une détection électrophysiologique fiable et le contrôle d’un robot exosquelette).
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.