Les insectes, malgré leur petite taille, possèdent des capacités de navigation étonnantes qui intriguent les chercheurs en intelligence artificielle. Des scientifiques de l’Université de Technologie de Delft se sont inspirés des stratégies de navigation des fourmis pour développer des robots autonomes légers, capables de retrouver leur chemin avec une consommation minimale de ressources informatiques.
Les insectes, tels que les fourmis, utilisent des techniques sophistiquées pour se déplacer sur de longues distances et revenir à leur point de départ. En observant ces comportements, les chercheurs ont développé une stratégie de navigation pour les petits robots autonomes. Cette méthode repose sur la combinaison de l’odométrie, qui consiste à compter les pas, et de la reconnaissance visuelle de l’environnement.
Les chercheurs de la TU Delft ont ainsi créé une stratégie de navigation inspirée des insectes pour des robots légers, permettant à ces derniers de parcourir de longues distances tout en consommant très peu de mémoire et de puissance de calcul. Cette avancée pourrait révolutionner l’utilisation des robots dans divers domaines, tels que la surveillance des stocks en entrepôt ou la détection de fuites de gaz dans l’industrie.
Des robots légers et autonomes
Les petits robots, pesant de quelques dizaines à quelques centaines de grammes, présentent de nombreuses applications pratiques. Leur légèreté les rend extrêmement sûrs, même en cas de collision accidentelle avec des personnes. De plus, leur petite taille leur permet de se faufiler dans des espaces restreints.
La production en masse de robots peu coûteux pourrait permettre de couvrir rapidement de vastes zones, par exemple pour détecter précocement des nuisibles ou des maladies dans les serres. Cependant, l’autonomie de ces robots reste un défi majeur en raison de leurs ressources limitées par rapport aux robots plus grands.

Les défis de la navigation autonome
Pour accomplir leurs tâches, ces robots doivent pouvoir naviguer de manière autonome. L’utilisation de l’infrastructure externe, telle que les satellites GPS ou les balises de communication sans fil, peut aider. Cependant, cette dépendance n’est pas toujours souhaitable ou possible, surtout dans des environnements intérieurs ou urbains densément bâtis.
Les méthodes d’intelligence artificielle couramment utilisées pour la navigation autonome sont souvent conçues pour des robots plus grands, comme les voitures autonomes. Ces approches nécessitent des capteurs lourds et gourmands en énergie, comme les télémètres LiDAR, qui ne peuvent être supportés par de petits robots.
Combiner odométrie et reconnaissance visuelle
Les chercheurs de la TU Delft ont donc cherché des solutions dans la nature. Les insectes, avec leurs capacités de déplacement sur de longues distances avec des capteurs et des ressources de calcul limités, ont inspiré une nouvelle stratégie. Les biologistes ont découvert que les insectes combinent l’odométrie avec des comportements guidés visuellement pour naviguer.
Les fourmis, par exemple, prennent régulièrement des instantanés visuels de leur environnement. En comparant ces instantanés avec leur environnement actuel, elles peuvent ajuster leur direction pour minimiser les différences et retrouver leur chemin. Cette technique, appelée «homing», permet de compenser les erreurs de positionnement dues à l’odométrie.
Des applications pratiques prometteuses
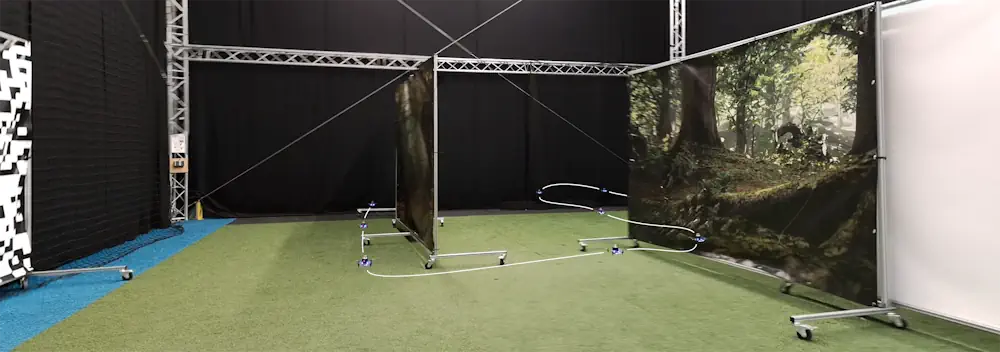
La stratégie de navigation inspirée des insectes a été testée avec succès sur un drone de 56 grammes, équipé d’une caméra omnidirectionnelle. Ce drone a pu parcourir des distances allant jusqu’à 100 mètres avec seulement 1,16 kilooctets de mémoire. Toutes les calculs ont été effectués sur une microcontrôleur, une petite unité de traitement présente dans de nombreux appareils électroniques bon marché.
Guido de Croon, professeur de drones bio-inspirés et co-auteur de l’étude, explique que cette stratégie représente une avancée significative vers l’utilisation pratique de petits robots autonomes. Bien que cette méthode ne génère pas de carte et permette uniquement de revenir à un point de départ spécifique, elle est suffisante pour de nombreuses applications. Par exemple, des drones pourraient surveiller les stocks dans un entrepôt ou les cultures dans une serre, collecter des données et retourner à leur station de base.
L’inspiration tirée des insectes ouvre de nouvelles perspectives pour le développement de robots autonomes légers et efficaces. Ces avancées promettent de transformer divers secteurs industriels en offrant des solutions innovantes et économiques pour des tâches complexes.
Légende illustration : Les petits drones ne peuvent être équipés que de très petits processeurs dotés d’une faible puissance de traitement et d’une faible mémoire. La navigation autonome est donc un grand défi, car l’IA actuelle pour la navigation nécessite beaucoup de puissance de traitement et de mémoire.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.