Lorsqu’un véhicule extraterrestre valant plusieurs millions de dollars s’enlise dans du sable mou ou du gravier, comme ce fut le cas pour le rover Spirit sur Mars en 2009, les ingénieurs basés sur Terre prennent le relais, tel un dépanneur virtuel, en émettant une série de commandes qui actionnent ses roues ou inversent sa trajectoire dans un effort délicat et fastidieux visant à le dégager et à lui permettre de poursuivre sa mission d’exploration.
Si Spirit est resté coincé de manière permanente, à l’avenir, de meilleurs tests de terrain ici même, sur la terre ferme, pourraient aider à éviter ces crises célestes.
À l’aide de simulations informatiques, les ingénieurs en mécanique de l’université du Wisconsin-Madison ont découvert une faille dans la manière dont les rovers sont testés sur Terre. Cette erreur conduit à des conclusions trop optimistes sur le comportement des rovers une fois qu’ils sont déployés dans le cadre de missions extraterrestres.
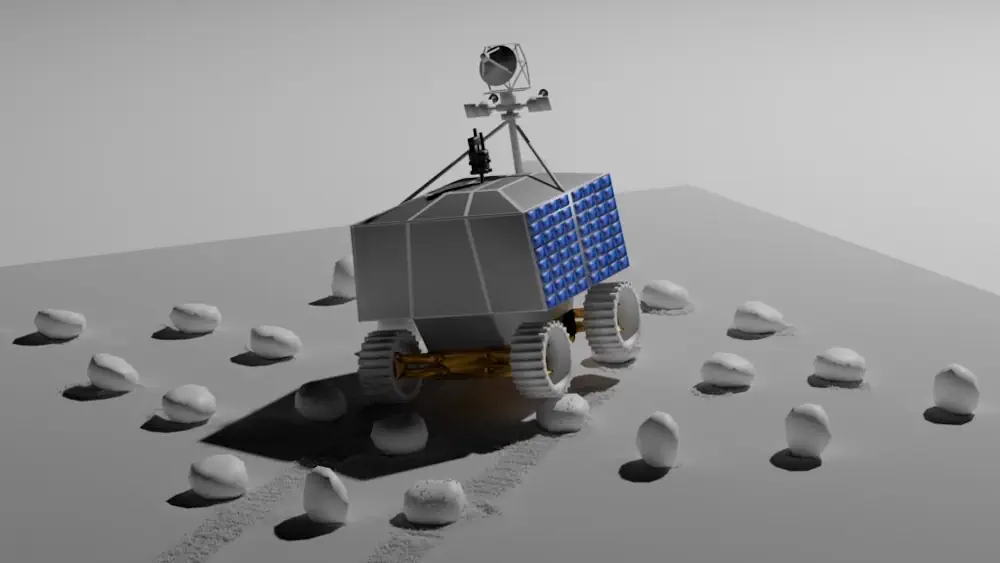
Un élément important dans la préparation de ces missions est une compréhension précise de la façon dont un rover traversera les surfaces extraterrestres en faible gravité afin d’éviter qu’il ne s’enlise dans des terrains meubles ou des zones rocheuses.
Sur la Lune, la force gravitationnelle est six fois plus faible que sur Terre. Pendant des décennies, les chercheurs qui testaient les rovers ont tenu compte de cette différence de gravité en créant un prototype représentant un sixième de la masse du rover réel. Ils testent ces rovers légers dans les déserts, observant comment ils se déplacent sur le sable afin de mieux comprendre comment ils fonctionneraient sur la Lune.
Il s’avère cependant que cette approche standard de test a négligé un détail apparemment insignifiant : l’attraction gravitationnelle de la Terre sur le sable du désert.
Grâce à une simulation, Dan Negrut, professeur de génie mécanique à l’université du Wisconsin-Madison, et ses collaborateurs ont déterminé que la gravité terrestre exerce une force beaucoup plus importante sur le sable que la gravité martienne ou lunaire. Sur Terre, le sable est plus rigide et offre un meilleur soutien, ce qui réduit le risque qu’il se déplace sous les roues d’un véhicule. Mais la surface de la Lune est plus « poudreuse » et se déplace donc plus facilement, ce qui signifie que les rovers ont moins d’adhérence, ce qui peut entraver leur mobilité.
« Rétrospectivement, l’idée est simple : nous devons tenir compte non seulement de l’attraction gravitationnelle exercée sur le rover, mais aussi de l’effet de la gravité sur le sable afin d’avoir une meilleure idée des performances du rover sur la Lune », explique M. Negrut. « Nos conclusions soulignent l’intérêt d’utiliser une simulation basée sur la physique pour analyser la mobilité des rovers sur un sol granuleux. »
La découverte des chercheurs est le fruit de leur travail sur un projet financé par la NASA visant à simuler le rover VIPER, qui avait été prévu pour une mission lunaire. L’équipe a utilisé Project Chrono, un moteur de simulation physique open source développé à l’université du Wisconsin-Madison en collaboration avec des scientifiques italiens. Ce logiciel permet aux chercheurs de modéliser rapidement et précisément des systèmes mécaniques complexes, tels que des rovers grandeur nature évoluant sur des surfaces de sable ou de sol « molles ».
Lors de la simulation du rover VIPER, ils ont remarqué des divergences entre les résultats des tests effectués sur Terre et leurs simulations de la mobilité du rover sur la Lune. En approfondissant leurs recherches à l’aide des simulations Chrono, ils ont découvert la faille dans les tests. Les chercheurs ont validé les résultats de leur simulation du rover VIPER par rapport aux résultats du laboratoire de simulation des opérations lunaires du centre de recherche Glenn de la NASA.
Les avantages de cette recherche vont bien au-delà de la NASA et des voyages spatiaux. Pour des applications sur Terre, Chrono a été utilisé par des centaines d’organisations afin de mieux comprendre des systèmes mécaniques complexes, allant des montres mécaniques de précision aux camions et chars de l’armée américaine opérant en tout-terrain.

« Il est gratifiant de constater que nos recherches sont très utiles pour aider à résoudre de nombreux défis techniques concrets », déclare M. Negrut. « Je suis fier de ce que nous avons accompli. Il est très difficile pour un laboratoire universitaire de produire un logiciel de qualité industrielle utilisé par la NASA. »
Chrono est gratuit et accessible au public pour une utilisation sans restriction dans le monde entier, mais l’équipe de l’UW-Madison consacre beaucoup d’efforts au développement et à la maintenance du logiciel, ainsi qu’à l’assistance aux utilisateurs.
« Il est très rare dans le milieu universitaire de produire un logiciel de ce niveau », ajoute M. Negrut. « Il existe certains types d’applications pertinentes pour la NASA et l’exploration planétaire où notre simulateur peut résoudre des problèmes qu’aucun autre outil ne peut résoudre, y compris les simulateurs des grandes entreprises technologiques, et c’est passionnant. »
Chrono étant open source, M. Negrut et son équipe se concentrent sur l’innovation et l’amélioration continues du logiciel afin qu’il reste pertinent.
« Toutes nos idées sont dans le domaine public et la concurrence peut les adopter rapidement, ce qui nous pousse à aller de l’avant », conclut-il. « Nous avons eu la chance, au cours de la dernière décennie, de bénéficier du soutien de la National Science Foundation, du Bureau de recherche de l’armée américaine et de la NASA. Ce financement a vraiment fait la différence, car nous ne facturons personne pour l’utilisation de notre logiciel. »
Article : « Le professeur Dan Negrut (au centre) avec les membres de son laboratoire d’ingénierie basée sur la simulation (SBEL) à UW-Madison. » – DOI : 10.1002/rob.22597
Les co-auteurs de l’article sont Wei Hu de l’Université Jiao Tong de Shanghai, Pei Li de l’UW-Madison, Arno Rogg et Alexander Schepelmann de la NASA, Samuel Chandler de ProtoInnovations, LLC, et Ken Kamrin du MIT.
Source : U. Wisconsin-Madison