Dans les domaines de la robotique et des technologies durables, une méthode innovante dans l’objectif de concevoir de nouveaux actionneurs souples et des muscles robotiques artificiels a été développée. Ces muscles présentent des performances améliorées et une consommation d’énergie considérablement réduite.
Les actionneurs, qui transforment l’énergie électrique en mouvement ou en force, jouent un rôle essentiel dans la vie quotidienne. Les actionneurs à base de matériaux souples ont attiré l’attention scientifique ces dernières années en raison de leur légèreté, de leur fonctionnement silencieux et de leur biodégradabilité.
Une approche simple pour créer des actionneurs souples consiste à utiliser des structures multi-matériaux, comme des « poches » faites de films plastiques flexibles remplis d’huiles et recouverts de plastiques conducteurs. Jusqu’à présent, l’application d’une activation électrique constante ne permettait que des contractions musculaires à court terme, ce qui constituait une limitation significative pour les applications pratiques.
Le chercheur Ion-Dan Sîrbu de l’école Sant’Anna, anciennement doctorant à l’Université de Trento sous la supervision de Giacomo Moretti et Marco Fontana, a commencé à étudier ce phénomène lors d’une période de recherche à l’Université Johannes Kepler à Linz. Avec le groupe de recherche autrichien, Ion-Dan Sîrbu a développé un système permettant une mesure précise de la force dans ces actionneurs.

Une découverte significative
« Pendant mes recherches sur les combinaisons de matériaux courantes », explique Ion-Dan Sîrbu, « j’ai également expérimenté un film plastique qu’un collègue doctorant, David Preninger, utilisait pour son travail sur les muscles artificiels biodégradables. Dès que nous avons remarqué que ce matériau pouvait maintenir une force constante pendant des périodes arbitrairement longues, nous avons réalisé que nous avions fait une découverte significative. »
Depuis lors, l’équipe a travaillé sur un modèle théorique et a effectué des caractérisations de matériaux approfondies. Il est apparu que les principaux résultats expérimentaux pouvaient être décrits avec précision à l’aide de modèles simples.
« La beauté de notre modèle réside dans sa simplicité et dans le fait qu’il ne se limite pas aux actionneurs existants. Nous pensons que nos résultats fourniront à la communauté scientifique un outil simple mais puissant pour concevoir et étudier de nouveaux systèmes », ajoute pour sa part David Preninger, coauteur de l’article et doctorant au département de physique de la matière molle de l’université Johannes Kepler.
« Ce qui est intéressant, c’est que non seulement nous avons rendu cette technologie plus fonctionnelle, mais notre étude permet d’identifier des combinaisons de matériaux qui permettent de réduire la consommation d’énergie d’un facteur de mille », ajoute le professeur Kaltenbrunner,
En synthèse
En utilisant les combinaisons de matériaux identifiées, les scientifiques ont réussi à développer et à faire fonctionner divers types de muscles artificiels, d’optiques à gradient variable et d’affichages tactiles.
« Comprendre les mécanismes fondamentaux sous-jacents aux actionneurs souples, comme l’a établi cette étude, a le potentiel de faire un bond significatif dans le domaine des dispositifs d’assistance, des machines automatiques et des robots mobiles pour l’exploration terrestre, marine et spatiale. Tous ces secteurs sont à la recherche de solutions à faible coût et à haute performance, qui doivent également être capables d’assurer une faible consommation et des impacts environnementaux pour la durabilité », souligne le professeur Fontana.
Pour une meilleure compréhension
Qu’est-ce qu’un actionneur souple ?
Un actionneur souple est un dispositif qui convertit l’énergie électrique en mouvement ou en force. Ces actionneurs sont souvent fabriqués à partir de matériaux souples, ce qui leur confère une légèreté, un fonctionnement silencieux et une biodégradabilité.
Quelle est la limitation des actionneurs souples actuels ?
La limitation majeure des actionneurs souples actuels est qu’ils ne permettent que des contractions musculaires à court terme lorsqu’ils sont soumis à une activation électrique constante. Cela pose un problème pour les applications pratiques qui nécessitent des contractions musculaires à long terme.
Quelle est la découverte majeure de cette recherche ?
La découverte majeure de cette recherche est l’identification de combinaisons de matériaux qui permettent aux actionneurs souples de maintenir une force constante pendant des périodes arbitrairement longues. Cela a été réalisé en expérimentant avec un film plastique spécifique.
Quels sont les avantages de cette découverte ?
Cette découverte permet de rendre la technologie des actionneurs souples plus fonctionnelle. Elle permet également d’identifier des combinaisons de matériaux qui peuvent réduire la consommation d’énergie jusqu’à mille fois.
Quelles sont les applications potentielles de cette découverte ?
Les applications potentielles de cette découverte sont nombreuses. Elles comprennent le développement de dispositifs d’assistance, de machines automatiques et de robots mobiles pour l’exploration terrestre, marine et spatiale. Tous ces secteurs sont à la recherche de solutions à faible coût et à haute performance, qui doivent également être capables d’assurer une faible consommation et des impacts environnementaux pour la durabilité.
Principaux enseignements
| Enseignements |
|---|
| Une nouvelle méthode pour concevoir des actionneurs souples et des muscles artificiels robotiques a été développée. |
| Cette méthode permet des performances améliorées et une consommation d’énergie considérablement réduite. |
| La découverte a été réalisée en expérimentant avec un film plastique spécifique. |
| Les actionneurs souples peuvent maintenant maintenir une force constante pendant des périodes arbitrairement longues. |
| Les combinaisons de matériaux identifiées peuvent réduire la consommation d’énergie jusqu’à mille fois. |
| Les applications potentielles de cette découverte comprennent le développement de dispositifs d’assistance, de machines automatiques et de robots mobiles pour l’exploration terrestre, marine et spatiale. |
Références
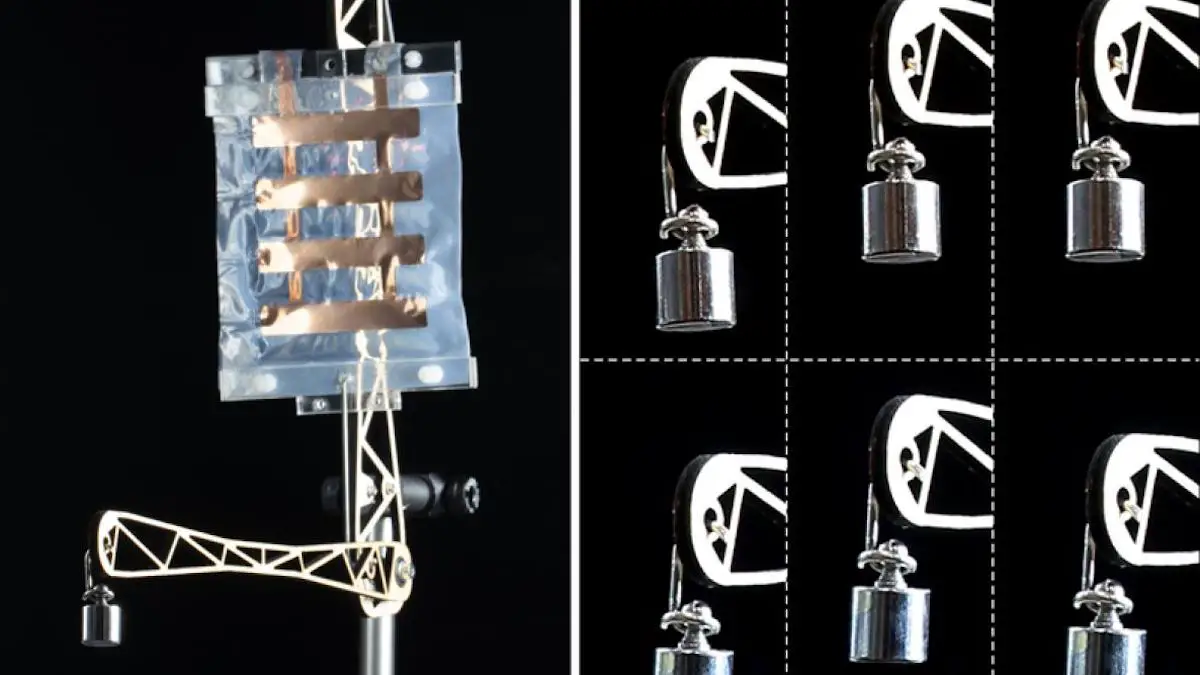
Légende illustration principale : Des muscles artificiels robotisés stables et efficaces construits à partir de nouvelles combinaisons de matériaux
Article publié dans la revue scientifique Nature Electronics. Les chercheurs principaux sont Martin Kaltenbrunner de l’Université Johannes Kepler à Linz et Marco Fontana de l’Institut d’intelligence mécanique à l’école Sant’Anna.
Article : « Electrostatic actuators with constant force at low power loss using matched dielectrics » – DOI: 10.1038/s41928-023-01057-0