Une innovation remarquable dans le domaine de la robotique vient de voir le jour. Des chercheurs ont conçu une jambe robotique actionnée par des muscles artificiels, offrant des performances supérieures aux modèles conventionnels. Cette avancée pourrait transformer notre approche de la conception des robots et mener à des machines plus agiles et efficaces.
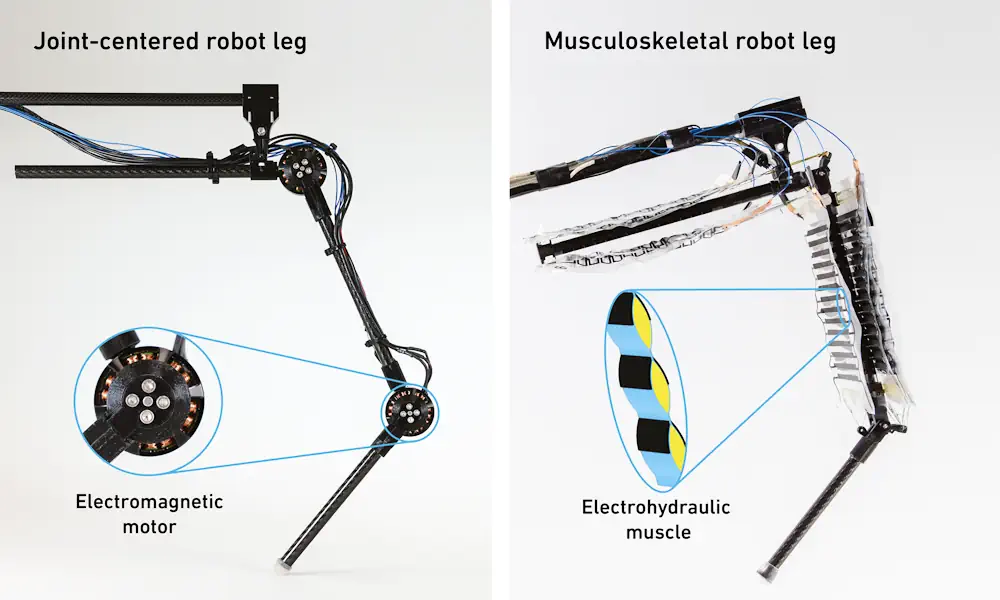
Depuis près de 70 ans, les robots ont été conçus autour de moteurs électriques, une technologie vieille de 200 ans. Cependant, une équipe de chercheurs de l’ETH Zurich et de l’Institut Max Planck pour les systèmes intelligents (MPI-IS) a décidé de rompre avec cette tradition. Leur création : une jambe robotique propulsée par des muscles artificiels, imitant plus fidèlement la biologie humaine et animale.
Cette nouvelle jambe robotique se distingue par ses capacités exceptionnelles. Elle peut effectuer des sauts élevés, des mouvements rapides, et même détecter et réagir aux obstacles – le tout sans recourir à des capteurs complexes. Robert Katzschmann, l’un des chercheurs principaux, explique : «Notre système offre une efficacité énergétique supérieure et une adaptabilité remarquable aux terrains irréguliers.»
Le fonctionnement des muscles artificiels
Au cœur de cette innovation se trouvent des actionneurs électro-hydrauliques, baptisés HASELs. Ces «muscles» sont composés de sacs en plastique remplis d’huile, dont la moitié est recouverte d’électrodes conductrices. Lorsqu’une tension est appliquée, les électrodes s’attirent, comprimant le sac et provoquant un mouvement similaire à la contraction musculaire.
Thomas Buchner, co-auteur principal de l’étude, décrit le phénomène : «L’attraction entre les électrodes fonctionne selon le même principe que l’électricité statique qui fait coller un ballon frotté à nos cheveux.» Cette approche permet une contraction et une extension contrôlées, imitant le fonctionnement des muscles extenseurs et fléchisseurs du corps humain.
Efficacité énergétique supérieure
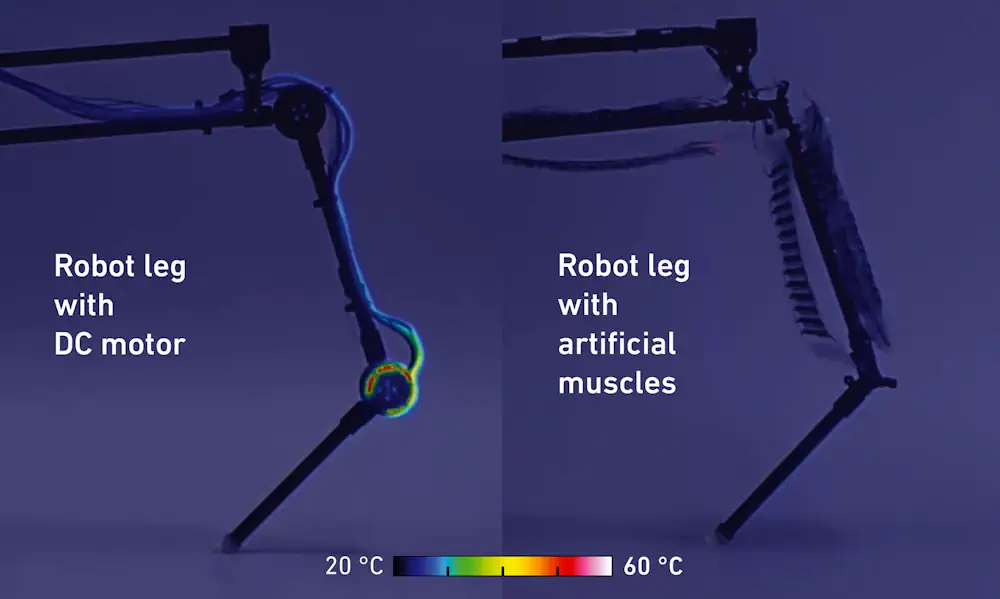
Les chercheurs ont comparé leur jambe robotique à un modèle conventionnel équipé d’un moteur électrique. Les résultats sont sans appel : la jambe à muscles artificiels consomme nettement moins d’énergie, notamment lors du maintien d’une position fixe. Toshihiko Fukushima, autre co-auteur principal, souligne : «Les robots à moteur électrique nécessitent généralement des systèmes de gestion thermique. Notre système s’en affranchit complètement.»
Adaptabilité et agilité accrues
L’un des atouts majeurs de cette jambe robotique réside dans son adaptabilité. Contrairement aux moteurs électriques qui requièrent des capteurs constants pour déterminer l’angle de la jambe, les muscles artificiels s’adaptent naturellement à l’environnement. Cette flexibilité permet une navigation aisée sur des terrains irréguliers, à l’instar du corps humain.
Christoph Keplinger, co-directeur de l’étude, met en perspective l’importance de cette innovation : «Le domaine de la robotique progresse rapidement en termes de contrôles avancés et d’apprentissage automatique. Cependant, l’innovation matérielle reste tout aussi importante. Cette publication rappelle le potentiel d’innovation disruptive des nouveaux concepts matériels, comme l’utilisation de muscles artificiels.»
Perspectives à venir
Bien que la technologie des actionneurs électro-hydrauliques soit encore jeune, ses applications potentielles sont vastes. Robert Katzschmann envisage déjà l’avenir : «Si nous parvenons à combiner cette jambe robotique dans un robot quadrupède ou un robot humanoïde à deux jambes, nous pourrions un jour déployer de tels systèmes comme robots de sauvetage.»
Cependant, des défis subsistent. La jambe robotique actuelle est fixée à une tige et ne peut se déplacer librement. Les prochaines étapes de recherche viseront à surmonter ces limitations, permettant le développement de véritables robots marcheurs dotés de muscles artificiels.
Cette innovation marque une étape significative dans l’évolution de la robotique, promettant des machines plus efficaces, adaptables et proches des capacités des organismes vivants. Les applications potentielles, allant des robots de sauvetage aux systèmes de préhension avancés, laissent entrevoir un futur où les robots joueront un rôle encore plus important dans notre société.


Légende illustration : La jambe robotique saute sur différents terrains. (Image : Thomas Buchner / ETH Zurich et Toshihiko Fukushima / Institut Max-Planck pour les systèmes intelligents)
Article : ‘Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion’ / ( 10.1038/s41467-024-51568-3 ) – ETH Zurich – Publication dans la revue Nature Communications