Dans le cadre de la transition vers une économie plus verte, l’entreprise GravitHy se lance dans un projet ambitieux visant à réduire les émissions de CO2 dans le secteur de la sidérurgie. Ce projet, qui pourrait transformer l’industrie de l’acier, est actuellement en phase de concertation publique.
Créée en juin 2022, GravitHy est une entreprise industrielle qui vise à accélérer la réduction des émissions de CO2 dans le secteur de la sidérurgie. Elle propose de produire du DRI (fer de réduction directe) et du HBI (fer briqueté à chaud) bas-carbone, des produits intermédiaires dans la chaîne de fabrication de l’acier, en utilisant de l’hydrogène bas-carbone. Ce projet est soutenu par un consortium d’actionnaires industriels et financiers.
GravitHy travaille en collaboration avec Asco Fields et RTE. Asco Fields, propriétaire du terrain visé pour le projet, est une filiale du Groupe IDEC et de la société Groupe LIFE. Elle est spécialisée dans l’aménagement et le développement de terrains à vocation industrielle.
De son côté, RTE, en charge du raccordement électrique, assure une mission de service public : garantir l’alimentation en électricité à tout moment et avec la même qualité de service sur le territoire national.
GravitHy : une solution innovante pour une sidérurgie plus verte
La sidérurgie est l’un des secteurs les plus émetteurs de gaz à effet de serre. La production d’acier se fait principalement par des hauts-fourneaux, en utilisant du charbon et de la coke, qui sont de forts émetteurs de gaz à effet de serre. Il est donc nécessaire de proposer une alternative durable pour répondre aux enjeux climatiques.
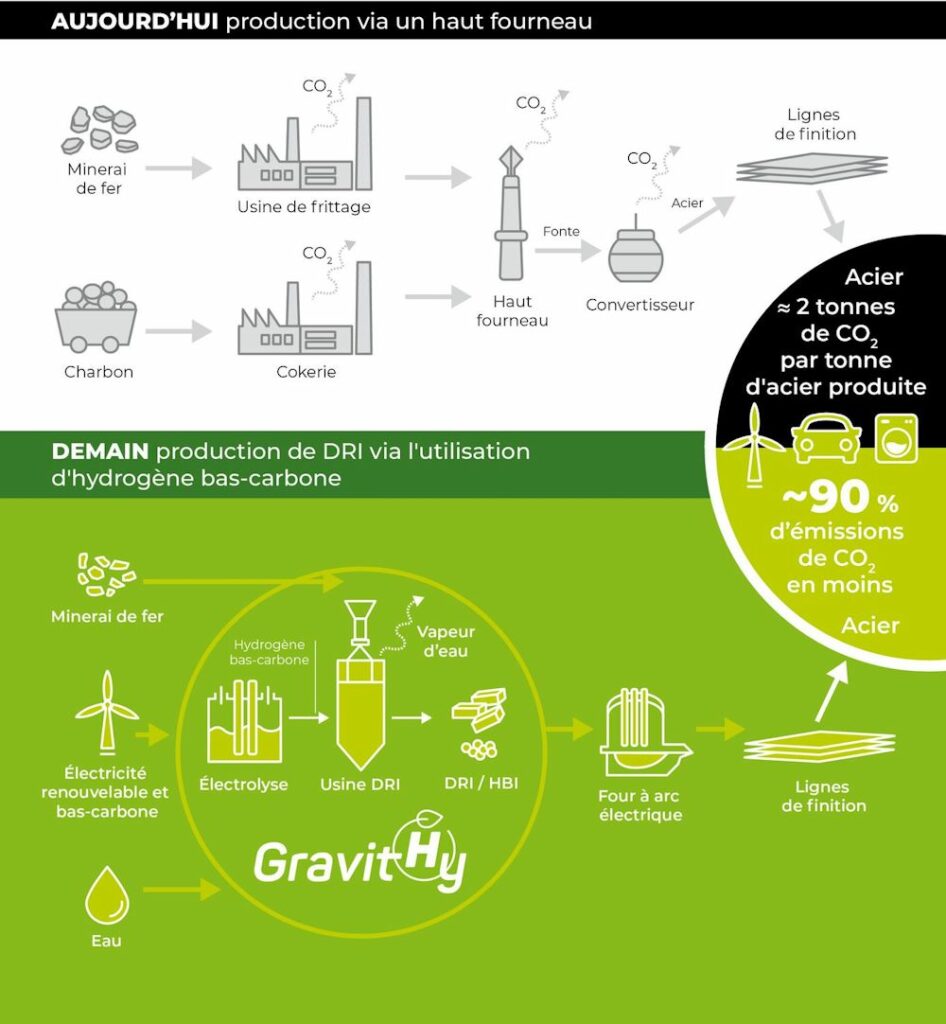
La solution proposée par GravitHy est de remplacer, dans le processus de production, le gaz naturel fossile par de l’hydrogène issu de l’électrolyse de l’eau, afin de minimiser l’empreinte carbone du DRI et du HBI. Cette innovation pourrait contribuer à réduire les émissions au niveau mondial, tout en renforçant la pérennité de l’ensemble des emplois de la chaîne sidérurgique du pays.

Impacts et bénéfices du projet GravitHy
L’implantation de l’usine GravitHy à Fos-sur-Mer pourrait générer des impacts à différents niveaux : humain, environnemental et économique. Le projet promet également de nombreux bénéfices. Il permettrait la création de 500 emplois directs et contribuerait à la transition écologique en proposant une solution faiblement émettrice de GES. De plus, le territoire bénéficierait des taxes et impôts liés à l’implantation d’une nouvelle usine.

En termes d’impacts environnementaux, GravitHy s’engage à prendre en compte les enjeux de préservation de la biodiversité et à mettre en place des mesures pour éviter, réduire et compenser les impacts de son implantation sur la biodiversité. Par ailleurs, une attention particulière sera portée à la préservation de la santé des habitants, notamment en ce qui concerne les émissions atmosphériques et les envols de poussières.
En synthèse
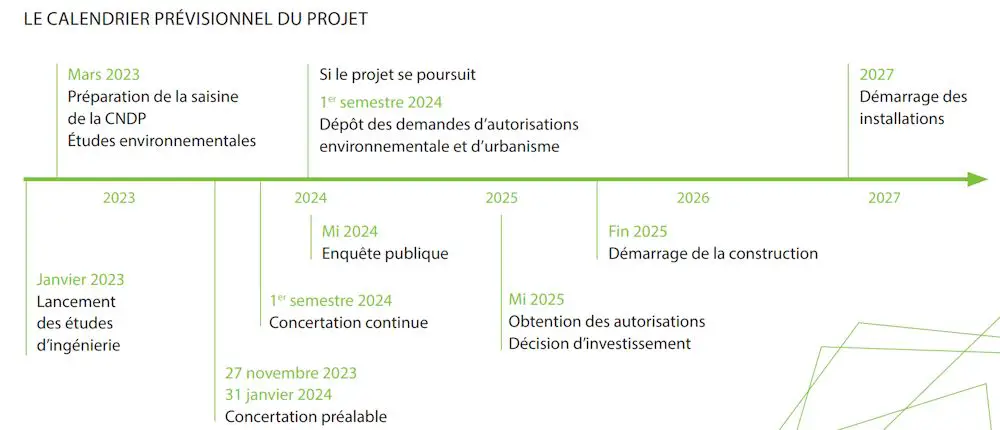
Le projet de GravitHy représente une étape importante dans la transition vers une sidérurgie plus verte. En proposant une solution innovante pour réduire les émissions de CO2 dans la production d’acier, GravitHy pourrait jouer un rôle clé dans la lutte contre le changement climatique. La concertation publique en cours permettra de recueillir les avis et les préoccupations des parties prenantes et de les intégrer dans la conception finale du projet.
Pour une meilleure compréhension
1. Qui est GravitHy et quels sont ses objectifs ?
GravitHy est une entreprise industrielle lancée en juin 2022. Elle vise à réduire les émissions de CO2 du secteur de la sidérurgie en proposant des produits intermédiaires bas-carbone pour la fabrication de l’acier.
2. Quelle est l’innovation majeure proposée par GravitHy ?
GravitHy propose de remplacer le gaz naturel fossile par de l’hydrogène dans le processus de production de l’acier. Cela permettrait de minimiser l’empreinte carbone du DRI (fer pré-réduit) et du HBI (fer briqueté à chaud).
3. Quels sont les impacts potentiels de l’implantation de GravitHy ?
L’implantation de GravitHy pourrait avoir des impacts à différents niveaux : humain, environnemental et économique. Ces impacts seront précisés dans le cadre des processus d’autorisations de l’usine et de son raccordement électrique.
4. Quels sont les bénéfices de l’implantation de GravitHy ?
L’implantation de GravitHy permettrait la création de 500 emplois directs et contribuerait à la transition écologique. De plus, elle pourrait renouveler l’image de Fos-sur-Mer, longtemps associée à l’industrie lourde.
5. Quels sont les enjeux de sécurité liés à l’implantation de GravitHy ?
L’étude de dangers décrira les risques naturels et technologiques liés à l’implantation de GravitHy, ainsi que les dispositifs mis en œuvre pour empêcher leur survenance ou pour en réduire les effets.
Principaux enseignements
| Enseignements |
|---|
| GravitHy est une entreprise industrielle lancée en 2022 visant à réduire les émissions de CO2 de la sidérurgie. |
| L’innovation majeure de GravitHy est l’utilisation de l’hydrogène pour minimiser l’empreinte carbone de la production d’acier. |
| L’implantation de GravitHy pourrait avoir des impacts humains, environnementaux et économiques. |
| GravitHy pourrait créer 500 emplois directs et contribuer à la transition écologique. |
| L’étude de dangers liée à l’implantation de GravitHy décrira les risques naturels et technologiques. |
Références
Source : Dossier GravitHy