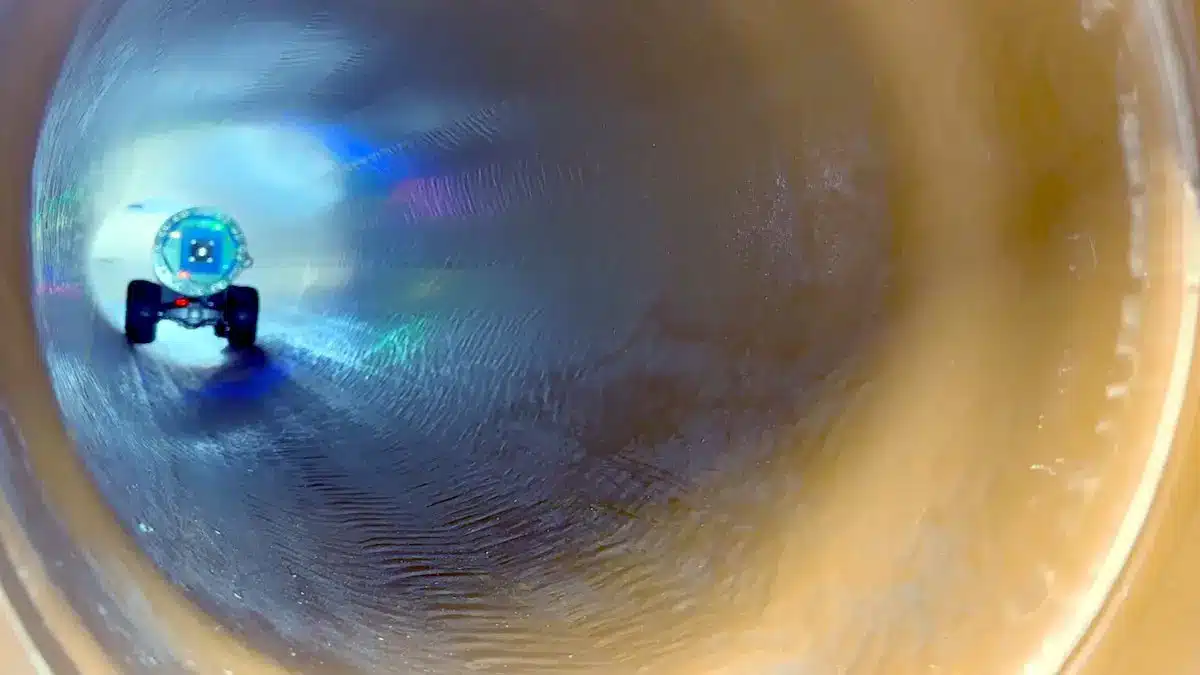
Une équipe de chercheurs anglais a mis au point une méthode innovante permettant à des robots mobiles d’inspecter de grandes structures tubulaires. Cette approche, qui utilise des capteurs d’ondes acoustiques guidées, a été testée avec succès sur un tube d’acier de trois mètres présentant plusieurs défauts.
Une approche innovante pour l’inspection des structures tubulaires
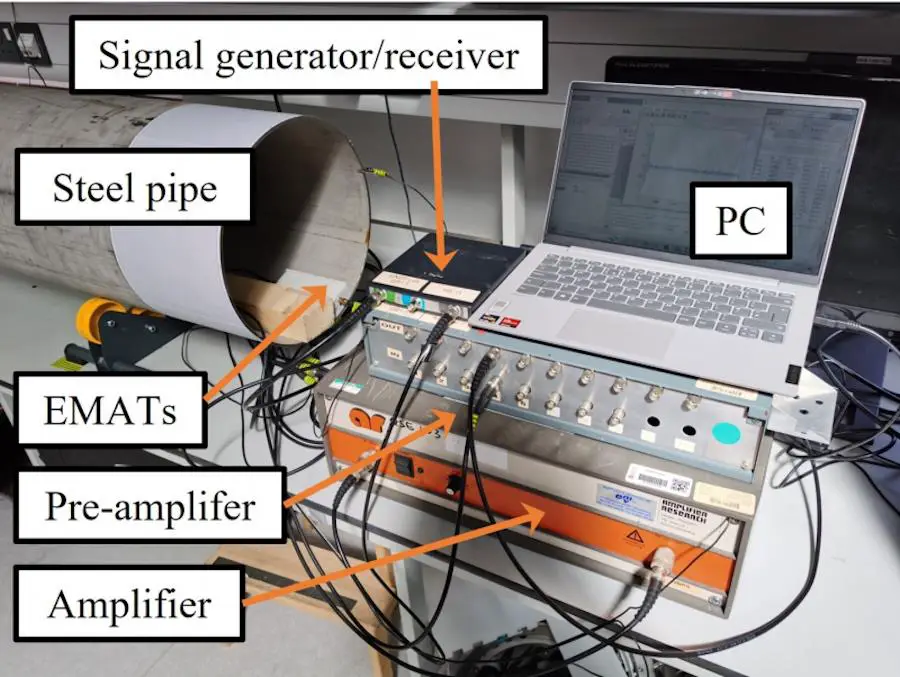
Le professeur Bruce Drinkwater et le professeur Anthony Croxford de l’Université de Bristol ont dirigé une équipe qui a développé une méthode d’inspection pour les grandes structures tubulaires. Cette méthode a été utilisée pour examiner un long tube d’acier présentant plusieurs défauts, dont des trous circulaires de différentes tailles, un défaut semblable à une fissure et des piqûres.
L’inspection a été réalisée selon un chemin d’inspection conçu pour obtenir une couverture de détection de 100% pour un défaut de référence défini.
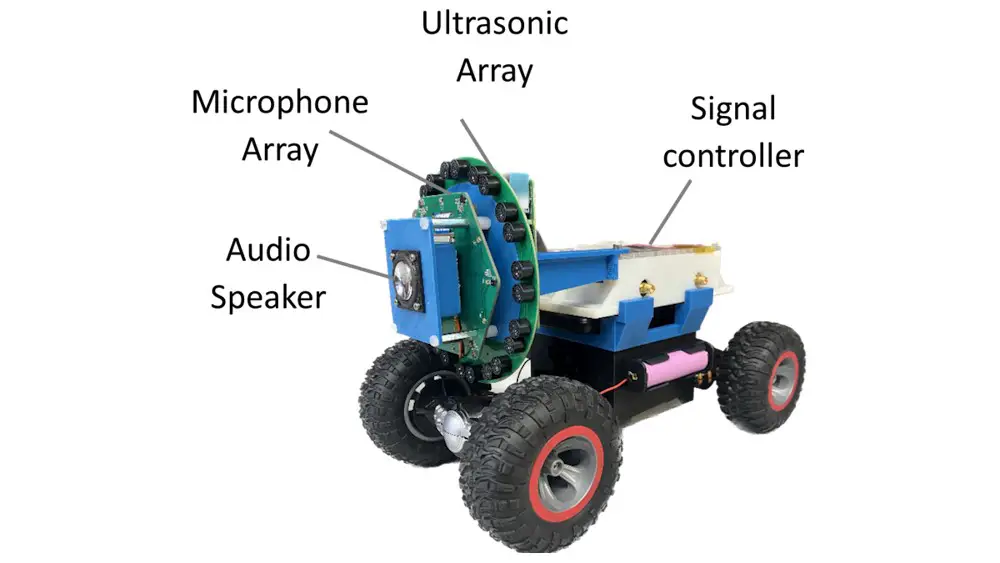
Les résultats de cette étude, publiés dans NDT and E International, démontrent comment l’équipe a réussi à inspecter efficacement de grandes structures de type plaque à l’aide d’un réseau de robots indépendants. Chaque robot était équipé de capteurs capables d’émettre et de recevoir des ondes acoustiques guidées, fonctionnant en mode impulsion-écho.
Les avantages de cette nouvelle méthode
Cette approche présente l’avantage majeur de minimiser la communication entre les robots, ne nécessite aucune synchronisation et offre la possibilité d’un traitement embarqué pour réduire les coûts de transfert de données. Cela permet de réduire les coûts globaux d’inspection. L’inspection a été divisée en deux étapes : la détection des défauts et la localisation des défauts.
Le Dr Jie Zhang, auteur principal de l’étude, a expliqué : « Il existe de nombreux systèmes robotiques avec des capteurs à ultrasons intégrés utilisés pour l’inspection automatisée des pipelines de l’intérieur. Cela permet à l’opérateur du pipeline d’effectuer les inspections nécessaires sans interrompre le flux de produit dans le pipeline. Cependant, les systèmes disponibles ont du mal à faire face à la variabilité des sections transversales des pipelines ou à la complexité du réseau, ce qui entraîne inévitablement une perturbation du pipeline pendant l’inspection. »
Vers une application plus large de cette méthode
Les méthodes employées sont généralement applicables à d’autres scénarios similaires et permettent de quantifier rapidement l’impact de toute décision concernant la méthode de détection ou de localisation. Elles pourraient être utilisées sur d’autres matériaux, géométries de tuyaux, niveaux de bruit ou modes d’ondes guidées, permettant d’explorer toute la gamme des paramètres de performance des capteurs, des tailles et types de défauts et des modalités de fonctionnement.
Les techniques peuvent également être utilisées pour évaluer la performance de détection et de localisation pour des paramètres d’inspection spécifiés, par exemple, prédire le défaut minimal détectable sous une probabilité de détection et une probabilité d’alarme fausse spécifiées.
En synthèse
En somme, cette nouvelle méthode d’inspection des grandes structures tubulaires par des robots mobiles, développée par une équipe de l’Université de Bristol, ouvre de nouvelles perspectives pour l’inspection des pipelines et autres structures similaires. Elle offre une couverture de détection de 100% pour un défaut de référence défini, tout en réduisant les coûts d’inspection.
L’équipe de recherche envisage maintenant de collaborer avec l’industrie pour faire avancer les prototypes actuels pour des inspections de tuyaux réelles. Ce travail est financé par le Conseil de recherche en ingénierie et sciences physiques du Royaume-Uni (EPSRC) dans le cadre du projet Pipebots.
Pour une meilleure compréhension
Qu’est-ce que la nouvelle méthode d’inspection des structures tubulaires ?
C’est une méthode développée par l’Université de Bristol qui permet à des robots mobiles d’inspecter de grandes structures tubulaires en utilisant des capteurs d’ondes acoustiques guidées.
Quels sont les avantages de cette méthode ?
Elle minimise la communication entre les robots, ne nécessite aucune synchronisation et offre la possibilité d’un traitement embarqué pour réduire les coûts de transfert de données, réduisant ainsi les coûts globaux d’inspection.
Quels types de défauts cette méthode peut-elle détecter ?
Elle peut détecter divers types de défauts, y compris des trous circulaires de différentes tailles, un défaut semblable à une fissure et des piqûres.
Cette méthode est-elle applicable à d’autres scénarios ?
Oui, les méthodes employées sont généralement applicables à d’autres scénarios similaires et permettent de quantifier rapidement l’impact de toute décision concernant la méthode de détection ou de localisation.
Quelle est la prochaine étape pour cette recherche ?
L’équipe de recherche envisage maintenant de collaborer avec l’industrie pour faire avancer les prototypes actuels pour des inspections de tuyaux réelles.
Principaux enseignements
| Enseignements |
|---|
| Une nouvelle méthode d’inspection des structures tubulaires a été développée |
| Cette méthode utilise des robots mobiles équipés de capteurs d’ondes acoustiques guidées |
| Elle permet une couverture de détection de 100% pour un défaut de référence défini |
| Elle minimise la communication entre les robots et ne nécessite aucune synchronisation |
| Elle offre la possibilité d’un traitement embarqué pour réduire les coûts de transfert de données |
| Elle est applicable à d’autres scénarios similaires |
| Elle permet de quantifier rapidement l’impact de toute décision concernant la méthode de détection ou de localisation |
| L’équipe de recherche envisage de collaborer avec l’industrie pour faire avancer les prototypes actuels |
Références
‘Pipe inspection using guided acoustic wave sensors integrated with mobile robots’ by Jie Zhang, Xudong Niu, Anthony J. Croxford, and Bruce W. Drinkwater in NDT and E International.