Les insectes cyborgs pourraient sembler sortir tout droit d’un film de science-fiction, mais il s’agit en réalité d’un phénomène relativement récent basé sur l’utilisation de stimuli électriques pour contrôler le mouvement des insectes. Ces robots hybrides insecte-ordinateur, comme on les appelle scientifiquement, annoncent l’avenir des dispositifs petits, très mobiles et efficaces.
Une étude sur la stimulation électrique des muscles des insectes
Malgré les progrès significatifs réalisés, les avancées sont compliquées par les différences considérables entre les systèmes nerveux et musculaires des différents insectes.
Dans une étude récente publiée dans la revue eLife, un groupe de recherche international a étudié la relation entre la stimulation électrique des muscles des pattes des phasmes et le couple résultant (la force de torsion qui fait bouger la patte).
Les muscles clés pour le mouvement des insectes
Les chercheurs se sont concentrés sur trois muscles des pattes qui jouent un rôle essentiel dans le mouvement des insectes : un pour la propulsion, un pour la rigidité de l’articulation et un pour la transition entre la position debout et le balancement de la patte.
Les expériences ont consisté à maintenir le corps des phasmes fixe et à stimuler électriquement l’un des trois muscles des pattes pour produire des mouvements similaires à la marche.

Une collaboration internationale
La recherche a été dirigée par Dai Owaki, professeur associé au Département de robotique de l’École supérieure d’ingénierie de l’Université de Tohoku. Les expériences ont été menées à l’Université de Bielefeld, en Allemagne, dans un laboratoire dirigé par les professeurs Volker Dürr et Josef Schmitz.
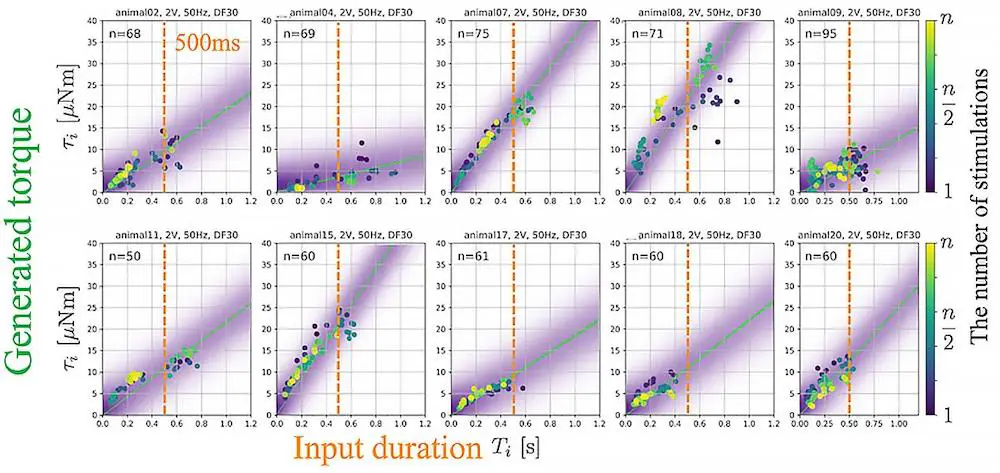
«Sur la base de nos mesures, nous avons pu générer un modèle qui prédisait le couple créé lorsque différents schémas de stimulation électrique étaient appliqués à un muscle de la patte», souligne Dai Owaki.
«Nous avons également identifié une relation presque linéaire entre la durée de la stimulation électrique et le couple généré, ce qui signifie que nous pouvions prédire la force de torsion que nous générerions en regardant simplement la longueur de l’impulsion électrique appliquée.»
Des applications pour les robots biohybrides
En utilisant seulement quelques mesures, les chercheurs ont pu appliquer ces résultats à chaque insecte individuel. Grâce à ces découvertes, les scientifiques pourront affiner le contrôle moteur des robots biohybrides accordés, rendant leurs mouvements plus précis.
Toutefois, l’équipe reconnaît que certaines difficultés clés doivent encore être surmontées. «Tout d’abord, les tests de modèles doivent être mis en œuvre chez des insectes en marche libre, et les stimuli électriques doivent être affinés pour imiter de manière plus étroite les signaux neuromusculaires naturels», ajoute pour conclure le professeur Dai Owaki.
En synthèse
Les insectes cyborgs représentent une nouvelle approche prometteuse pour le développement de dispositifs mobiles et efficaces. Les recherches menées sur la stimulation électrique des muscles des insectes permettent d’améliorer la compréhension des mécanismes de mouvement et d’affiner le contrôle moteur des robots biohybrides.
Pour une meilleure compréhension
1. Qu’est-ce qu’un insecte cyborg ?
Un insecte cyborg est un hybride entre un insecte et un ordinateur, utilisant des stimuli électriques pour contrôler le mouvement de l’insecte. Ces robots hybrides insecte-ordinateur représentent l’avenir des dispositifs petits, très mobiles et efficaces.
2. Quel est l’objectif de l’étude sur la stimulation électrique des muscles des insectes ?
L’objectif de cette étude est de mieux comprendre la relation entre la stimulation électrique des muscles des pattes des insectes et le couple résultant, afin d’améliorer le contrôle moteur des robots biohybrides et de rendre leurs mouvements plus précis.
3. Quels sont les muscles clés pour le mouvement des insectes ?
Les chercheurs se sont concentrés sur trois muscles des pattes : un pour la propulsion, un pour la rigidité de l’articulation et un pour la transition entre la position debout et le balancement de la patte.
4. Quelles sont les institutions impliquées dans cette étude ?
L’étude a été dirigée par l’Université de Tohoku et menée à l’Université de Bielefeld, en Allemagne, dans un laboratoire dirigé par les professeurs Volker Dürr et Josef Schmitz.
5. Quels sont les défis à surmonter pour améliorer les robots biohybrides ?
Les défis à surmonter incluent l’adaptation des modèles aux insectes en marche libre et l’amélioration des stimuli électriques pour imiter de manière plus réaliste les signaux neuromusculaires naturels.
Titre : Un modèle hiérarchique pour le contrôle électrique externe d’un insecte, tenant compte de la variation interindividuelle des propriétés de la force musculaire
Auteurs : Dai Owaki, Volker Dürr, Josef Schmitz
Journal : eLife / DOI : 10.7554/eLife.85275
– eLife, étude sur la stimulation électrique des muscles des insectes
– Université de Tohoku, Département de robotique
– Université de Bielefeld, laboratoire dirigé par les professeurs Volker Dürr et Josef Schmitz