Les chiens guides offrent une autonomie et une mobilité remarquables à leurs utilisateurs. Seulement une fraction des personnes malvoyantes en possède un. Les obstacles incluent la rareté des chiens formés, le coût élevé de la formation (40 000 $), les allergies et d’autres limitations physiques. Les robots pourraient combler ce besoin si les concepteurs parviennent à intégrer les bonnes fonctionnalités.
Les caractéristiques essentielles d’un chien guide robotique
Les auteurs d’un article primé suggèrent de demander aux personnes aveugles ce dont elles ont besoin. Dirigée par des chercheurs de l’Université du Massachusetts à Amherst, une étude identifiant comment développer des chiens guides robotiques avec des informations provenant des utilisateurs et des formateurs de chiens guides a remporté le prix du meilleur article à la conférence CHI 2024 sur les facteurs humains dans les systèmes informatiques (CHI), le principal lieu de recherche sur l’interaction homme-machine.
Donghyun Kim, professeur adjoint au Manning College of Information and Computer Science (CICS) de l’UMass Amherst et l’un des auteurs correspondants de l’article primé, explique : « Nous ne sommes pas les premiers à développer des robots chiens guides. Il y a 40 ans d’études, et aucun de ces robots n’est réellement utilisé par les utilisateurs finaux. Nous avons essayé de résoudre ce problème en premier afin que, avant de développer la technologie, nous comprenions comment ils utilisent le chien guide et quelle technologie ils attendent. »

Les attentes des utilisateurs de chiens guides
Pour cette étude, l’équipe de recherche a mené des entretiens semi-structurés et des sessions d’observation avec 23 utilisateurs de chiens guides malvoyants et cinq formateurs. Grâce à une analyse thématique, ils ont distillé les limitations actuelles des chiens guides canins, les traits recherchés par les utilisateurs et les considérations pour les futurs chiens guides robotiques.
Un thème subtil qui a émergé de ces entretiens est l’équilibre délicat entre l’autonomie du robot et le contrôle humain. « À l’origine, nous pensions développer une voiture autonome », indique Donghyun Kim. Ils imaginaient que l’utilisateur indiquerait au robot où aller et que le robot naviguerait de manière autonome jusqu’à cet endroit avec l’utilisateur en remorque. Ce n’est pas le cas.
Les défis de la navigation
Les entretiens ont révélé que les utilisateurs ne se servent pas de leur chien comme d’un système de navigation global. Au lieu de cela, l’utilisateur contrôle l’itinéraire général tandis que le chien est responsable de l’évitement des obstacles locaux. Toutefois, même cela n’est pas une règle stricte. Les chiens peuvent également apprendre des itinéraires par habitude et peuvent éventuellement guider une personne vers des destinations régulières sans commandes directionnelles de l’utilisateur.
Donghyun Kim souligne : « Lorsque l’utilisateur fait confiance au chien et lui donne plus d’autonomie, c’est un peu délicat. Nous ne pouvons pas simplement créer un robot entièrement passif, suivant uniquement l’utilisateur, ou entièrement autonome, car alors [l’utilisateur] se sent en danger. »

Les recommandations pour les développeurs de robots
Les chercheurs espèrent que cet article servira de guide, non seulement dans le laboratoire de Donghyun Kim, mais aussi pour d’autres développeurs de robots. Hochul Hwang, premier auteur de l’article et doctorant ajoute : « Dans cet article, nous donnons également des indications sur la manière de développer ces robots pour qu’ils soient réellement déployables dans le monde réel. »
Par exemple, il mentionne qu’une autonomie de batterie de deux heures est une caractéristique importante pour les trajets quotidiens, qui peuvent durer une heure chacun. « Environ 90 % des personnes ont mentionné l’autonomie de la batterie », dit-il. « C’est une partie cruciale lors de la conception du matériel, car les robots quadrupèdes actuels ne durent pas deux heures. »
Ce ne sont là que quelques-unes des conclusions de l’article. D’autres incluent : ajouter plus d’orientations de caméra pour aider à éviter les obstacles en hauteur ; ajouter des capteurs audio pour détecter les dangers provenant des zones occultées ; comprendre le terme « trottoir » pour transmettre l’indication « aller tout droit », ce qui signifie suivre la rue (et non voyager en ligne droite) ; et aider les utilisateurs à monter dans le bon bus (et ensuite trouver un siège).
Les chercheurs affirment que cet article est un excellent point de départ, ajoutant qu’il y a encore plus d’informations à extraire de leurs 2 000 minutes d’audio et 240 minutes de données vidéo.
La reconnaissance de la communauté scientifique
Remporter le prix du meilleur article a été une distinction qui a placé le travail dans le top 1 % de tous les articles soumis à la conférence.
« L’aspect le plus excitant de la victoire de ce prix est que la communauté de recherche reconnaît et valorise notre direction », déclare encore Donghyun Kim. « Puisque nous ne croyons pas que les robots chiens guides seront disponibles pour les personnes malvoyantes dans un an, ni que nous résoudrons tous les problèmes, nous espérons que cet article inspirera un large éventail de chercheurs en robotique et en interaction homme-robot, aidant notre vision à se réaliser plus tôt. »
En fin de compte, le chercheur comprend que la robotique peut faire le plus de bien lorsque les scientifiques se souviennent de l’élément humain.
« Mon doctorat et mes recherches postdoctorales portent sur la manière de rendre ces robots plus performants », conclut le Professeur adjoint. « Nous avons essayé de trouver [une application qui soit] pratique et significative pour l’humanité. »
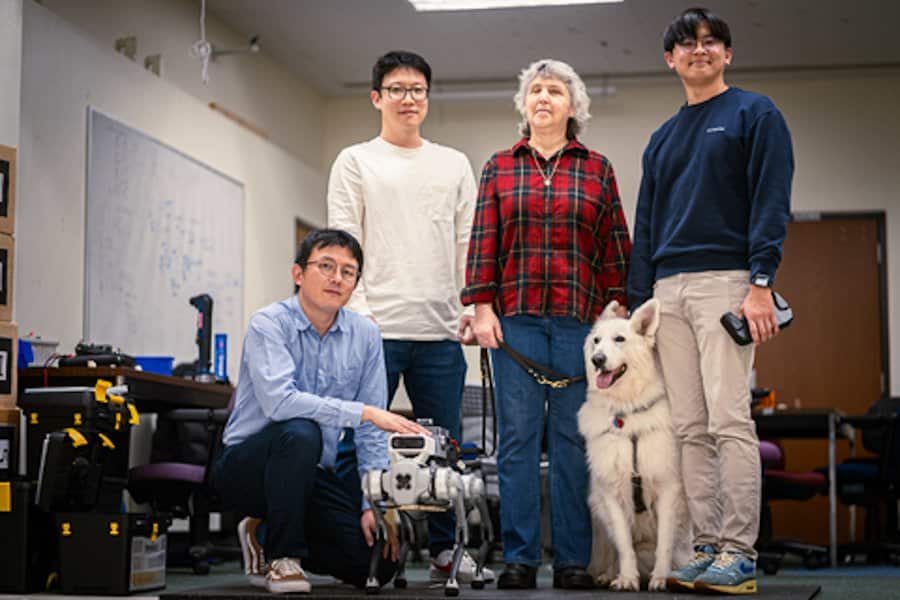
Légende illustration : Une recherche primée menée par l’UMass Amherst montre que pour réussir, les utilisateurs et les dresseurs de chiens-guides doivent fournir des informations sur les caractéristiques qui rendent les robots d’assistance utiles dans le monde réel.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.