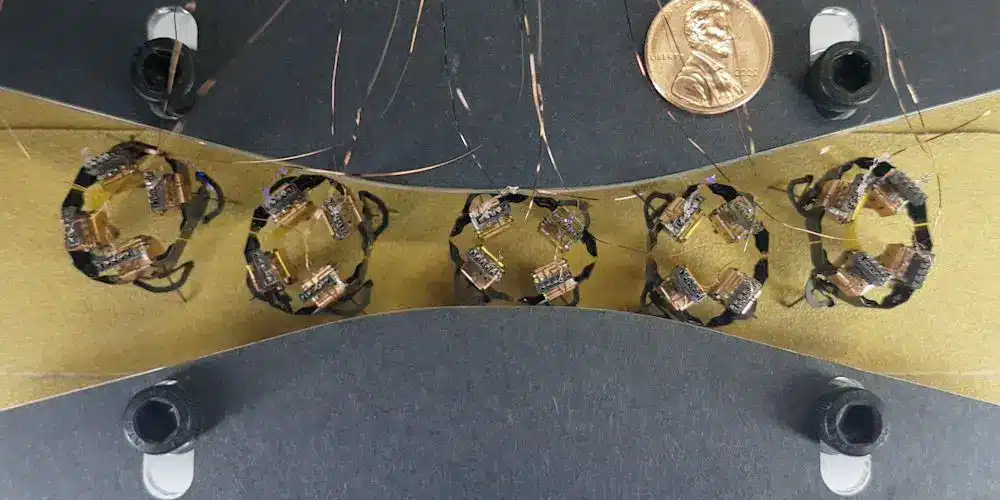
Dans le domaine de la robotique, la miniaturisation est un enjeu majeur. Une équipe d’ingénieurs de l’Université du Colorado a récemment présenté mCLARI, un robot modulaire de seulement 2 centimètres capable de changer passivement de forme pour se faufiler à travers des espaces étroits dans plusieurs directions. Ce robot, qui pèse moins d’un gramme, peut supporter plus de trois fois son poids corporel en charge supplémentaire.
Une avancée récompensée
Les travaux de recherche sur mCLARI ont été dirigés par Kaushik Jayaram, professeur assistant au département de génie mécanique Paul M. Rady, et l’étudiant en doctorat Heiko Kabutz.
Leur travail a récemment remporté le prix du meilleur article sur la sécurité, la sécurité et les robots de sauvetage lors de la Conférence internationale 2023 sur les robots intelligents et les systèmes à Detroit.


Un robot plus petit et plus rapide
Le robot mCLARI est une amélioration du précédent robot de l’équipe, CLARI, en étant plus petit et plus rapide. Il peut manœuvrer habilement dans des environnements encombrés en passant de la course en avant à la course de côté, non pas en tournant, mais en changeant de forme. Cette propriété lui donne le potentiel d’aider les premiers intervenants après des catastrophes majeures.
Vers des robots à l’échelle des insectes
La recherche de l’équipe de Jayaram rapproche le monde de la réalisation de robots à l’échelle des insectes capables de se déplacer sans problème dans des terrains naturels similaires à leurs homologues animaux.
Cette caractéristique est en grande partie dû à la combinaison de l’adaptabilité d’un robot souple avec l’agilité d’un robot rigide.
Leur dernière version est réduite de 60% en longueur et de 38% en masse, tout en conservant 80% de la puissance d’actionnement par rapport à son prédécesseur. Le robot est également plus de trois fois plus rapide que son prédécesseur, atteignant des vitesses de course de 60 millimètres par seconde, soit trois fois sa longueur corporelle par seconde.
Principaux enseignements
| mCLARI est un robot de 2 cm qui peut changer de forme pour se faufiler à travers des espaces étroits. |
| mCLARI peut supporter plus de trois fois son poids corporel en charge supplémentaire. |
| mCLARI est plus de trois fois plus rapide que son prédécesseur, atteignant des vitesses de course de 60 millimètres par seconde. |
| mCLARI a le potentiel d’aider les premiers intervenants après des catastrophes majeures. |
Galerie photos ( en action )



Explorateur du monde
Les chercheurs considèrent leur conception actuelle comme la première d’une série de robots CLARI qui, ils l’espèrent, deviendront plus petits et plus agiles.
Dans les prochaines versions, les chercheurs souhaitent intégrer des capteurs à CLARI afin qu’il puisse détecter les obstacles et y réagir. Le groupe étudie également la manière de donner au robot le bon mélange de flexibilité et de force, a indiqué M. Kabutz, une tâche qui deviendra de plus en plus difficile au fur et à mesure que l’équipe ajoutera des pattes.
À terme, l’équipe souhaite mettre au point des robots changeurs de forme qui ne se contentent pas de se déplacer dans un environnement de laboratoire, mais dans un espace naturel complexe, où les machines devront rebondir sur des obstacles tels que des arbres ou même des brins d’herbe, ou encore se faufiler dans les fissures entre les rochers et continuer à avancer.
« Lorsque nous essayons d’attraper un insecte, il peut disparaître dans une fente », explique M. Kabutz. « Mais si nous avons des robots ayant les capacités d’une araignée ou d’une mouche, nous pouvons ajouter des caméras ou des capteurs, et maintenant nous sommes capables de commencer à explorer des espaces où nous ne pouvions pas aller auparavant. »
En synthèse
La dernière avancée en matière de miniaturisation est rendue possible par la conception basée sur l’origami et la technique de fabrication en stratifié que Kaushik Jayaram et ses collègues ont précédemment utilisée pour fabriquer un robot appelé HAMR-Jr.
Grâce à cette approche novatrice, les deux chercheurs peuvent réduire (ou augmenter) leur conception sans sacrifier la dextérité mécanique, rapprochant ainsi ces robots de la taille nécessaire pour des applications réelles. L’inspection et la maintenance d’actifs comme les moteurs à réaction sont tout à fait possible.
Heiko Kabutz, l’auteur principal de la nouvelle étude, a des mains de chirurgien qui lui permettent de construire et de plier les minuscules modules de jambes du robot. Il a grandi fasciné par les robots et a participé à des compétitions de robotique au lycée. « Au départ, j’étais intéressé par la construction de robots plus grands », a t-il commenté, « mais quand je suis arrivé au laboratoire de Jayaram, il m’a vraiment intéressé à la construction de robots bio-inspirés à l’échelle des insectes. »
Pour une meilleure compréhension
Qu’est-ce que le robot mCLARI ?
mCLARI est un robot modulaire de 2 centimètres de long qui peut changer passivement de forme pour se faufiler à travers des espaces étroits dans plusieurs directions. Il pèse moins d’un gramme mais peut supporter plus de trois fois son poids corporel en charge supplémentaire.
Qui a dirigé la recherche sur mCLARI ?
La recherche a été dirigée par Kaushik Jayaram, professeur assistant au département de génie mécanique Paul M. Rady de l’Université du Colorado à Boulder, et l’étudiant en doctorat Heiko Kabutz.
Quelle est l’amélioration apportée par mCLARI par rapport à son prédécesseur ?
mCLARI est une amélioration du précédent robot de l’équipe, CLARI, en étant plus petit et plus rapide. Il peut manœuvrer habilement dans des environnements encombrés en passant de la course en avant à la course de côté, non pas en tournant, mais en changeant de forme.
Quel est le potentiel d’utilisation de mCLARI ?
mCLARI a le potentiel d’aider les premiers intervenants après des catastrophes majeures grâce à sa capacité à se déplacer dans des espaces étroits et encombrés.
Quelle est la prochaine étape pour l’équipe de recherche ?
L’équipe de recherche de Kaushik Jayaram cherche à réaliser des robots à l’échelle des insectes capables de se déplacer sans problème dans des terrains naturels similaires à leurs homologues animaux.
Université du Colorado à Boulder, Département de génie mécanique Paul M. Rady, Conférence internationale 2023 sur les robots intelligents et les systèmes à Detroit
Heiko Kabutz et al, mCLARI: a shape-morphing insect-scale robot capable of omnidirectional terrain-adaptive locomotion in laterally confined spaces, arXiv (2023). DOI: 10.48550/arxiv.2310.04538