Cassidy Beach
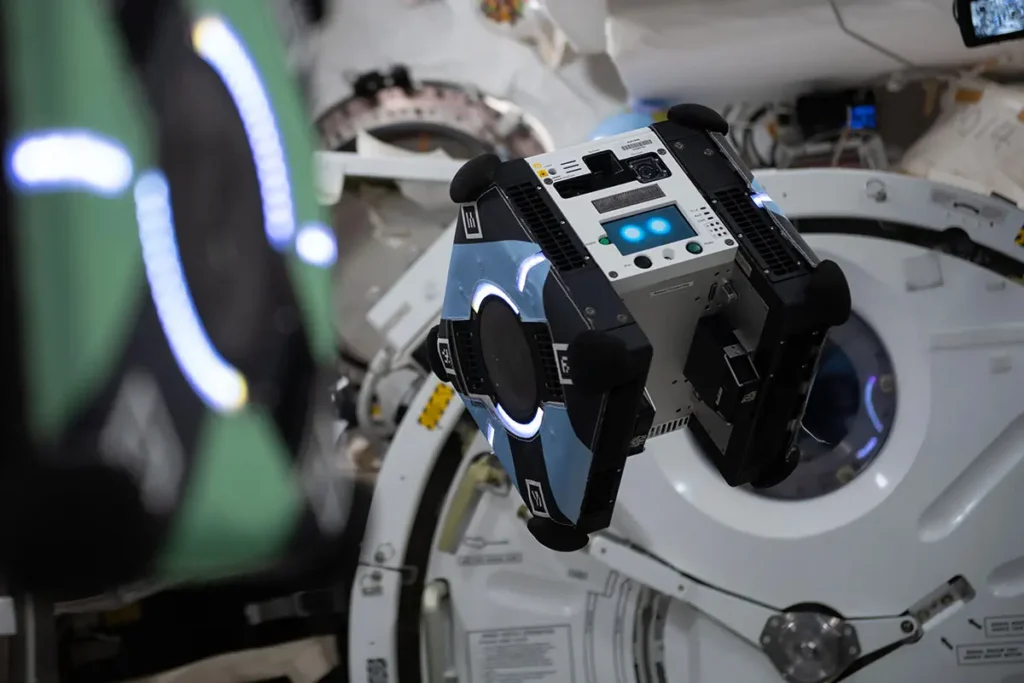
Imaginez un robot de la taille d’un grille-pain flottant dans les couloirs étroits de la Station spatiale internationale, déplaçant discrètement des fournitures ou vérifiant les fuites – le tout sans qu’un astronaute ne le contrôle. Une telle technologie pourrait libérer un temps précieux pour les astronautes et ouvrir de nouvelles opportunités pour l’exploration robotique. Cette vision de science-fiction se rapproche de la réalité maintenant que des chercheurs de Stanford sont les premiers à démontrer qu’un contrôle basé sur l’apprentissage automatique peut fonctionner à bord de l’ISS.
De nouvelles recherches, publiées et présentées lors de la Conférence internationale 2025 sur la robotique spatiale (iSpaRo), présentent un système conçu pour aider Astrobee, un robot cubique propulsé par ventilateur, à naviguer de manière autonome dans la Station spatiale internationale. L’ISS est un environnement complexe composé de modules interconnectés remplis d’ordinateurs, de stockage, de câblage et de matériel expérimental. Cela rend la planification d’un mouvement sûr pour Astrobee loin d’être triviale, explique Somrita Banerjee, chercheuse principale qui a mené ces travaux dans le cadre de son doctorat à Stanford.
Les approches traditionnelles de planification autonome qui ont gagné du terrain sur Terre sont largement impraticables pour le matériel certifié pour l’espace. Précise Marco Pavone, auteur principal, professeur associé d’aéronautique et d’astronautique à la School of Engineering et directeur du Stanford’s Autonomous Systems Laboratory : « Les ordinateurs de vol pour exécuter ces algorithmes sont souvent plus limités en ressources que ceux des robots terrestres. De plus, dans un environnement spatial, l’incertitude, les perturbations et les exigences de sécurité sont souvent plus contraignantes que dans les applications terrestres. »
Malgré ces défis, l’équipe a fait avancer le domaine avec une réalisation notable en recherche spatiale. Souligne Banerjee : « C’est la première fois que l’IA est utilisée pour aider à contrôler un robot sur l’ISS. Cela montre que les robots peuvent se déplacer plus vite et plus efficacement sans sacrifier la sécurité, ce qui est essentiel pour les futures missions où les humains ne pourront pas toujours les guider. »
Entraîner l’IA pour l’espace
Banerjee compare le défi d’optimiser les trajets d’Astrobee dans l’ISS à la planification d’un voyage en voiture de San Francisco à Los Angeles : on veut le chemin le plus rapide, le plus économe en énergie et, surtout, le plus sûr.
Pour relever ce défi dans l’environnement compact de l’ISS, le système de planification d’itinéraire de l’équipe s’appuie sur une méthode d’optimisation traditionnellement utilisée appelée programmation convexe séquentielle, qui décompose un problème de planification difficile en une série d’étapes plus petites et plus simples. Ce processus est conçu pour produire une trajectoire finale sûre et réalisable. Cependant, résoudre chaque étape à partir de zéro peut être exigeant pour l’ordinateur embarqué d’Astrobee et peut ralentir le processus – l’une des principales limites des techniques conventionnelles.
Dans le but d’accélérer les choses, l’équipe a amélioré son système avec un modèle basé sur l’apprentissage automatique qu’elle a entraîné sur des milliers de solutions de trajectoires passées. Le modèle peut révéler des motifs tels que l’emplacement d’un couloir toujours présent et celui où les obstacles ont tendance à se trouver. Fournir au robot une connaissance fondamentale avant des ajustements ultérieurs est connu sous le nom d’« amorçage chaud » (warm start). La technique d’optimisation impose toujours toutes les contraintes de sécurité ; le modèle d’apprentissage automatique l’aide simplement à atteindre la réponse beaucoup plus rapidement.
Illustre Banerjee : « Utiliser un amorçage chaud, c’est comme planifier un voyage en voiture en commençant par un itinéraire que de vraies personnes ont déjà emprunté, plutôt que de tracer une ligne droite sur la carte. Vous commencez avec quelque chose d’informé par l’expérience, puis vous optimisez à partir de là. »
Une étape importante pour l’IA dans l’espace
Avant d’envoyer leur IA dans l’espace, l’équipe a appliqué le système à un banc d’essai spécial au centre de recherche Ames de la NASA. Là, ils ont fait fonctionner le modèle d’IA sur un robot similaire à Astrobee, alors qu’il flottait juste au-dessus de la surface d’une table en granit, porté par de l’air comprimé qui imite une microgravité partielle. Compara Banerjee : « C’est comme un palet sur une table de air-hockey. »
Lorsque le jour du vrai test est arrivé, l’équipe de Stanford s’est jointe par appel vidéo tandis que les astronautes de l’ISS terminaient ce que la NASA appelle une configuration « à équipage minimal ». Les astronautes ne se sont occupés que de la préparation et du nettoyage, puis se sont écartés. Pendant les quatre heures suivantes, Banerjee a envoyé des instructions aux opérateurs au sol du centre spatial Johnson de la NASA à Houston. Ensuite, l’équipe de la NASA a relayé les commandes à Astrobee, spécifiant son point de départ et sa destination, simulant des obstacles à éviter, et essayant à la fois des amorçages chauds et froids. Plusieurs mesures de sécurité ont maintenu l’expérience en sécurité, notamment le remplacement des obstacles physiques par des obstacles virtuels pour éliminer le risque de collision, le maintien d’un robot de secours et la possibilité pour les opérateurs d’interrompre une exécution si nécessaire.
C’est la première fois que l’IA est utilisée pour aider à contrôler un robot sur l’ISS. Cela montre que les robots peuvent se déplacer plus vite et plus efficacement sans sacrifier la sécurité, ce qui est essentiel pour les futures missions où les humains ne pourront pas toujours les guider. Somrita Banerjee, Chercheuse principale
L’équipe a testé 18 trajectoires, chacune durant plus d’une minute. Chacune a été exécutée deux fois : d’abord avec un amorçage froid utilisant la méthode de planification standard, puis avec un amorçage chaud, où l’IA fournissait une première ébauche du chemin que le système pouvait ajuster rapidement.
Les tests ont montré que donner un amorçage chaud à Astrobee accélérait significativement la planification du mouvement. Révèle Banerjee : « Nous avons montré que c’est 50 à 60 % plus rapide, surtout dans les situations plus difficiles. » Ces cas plus ardus comprenaient les zones encombrées, les couloirs étroits et les manœuvres nécessitant une rotation au lieu d’un trajet rectiligne.
Observer Astrobee en orbite a été une expérience profondément personnelle pour Banerjee. Confie-t-elle : « Le plus cool, c’était d’avoir des astronautes qui flottaient à proximité pendant l’expérience. L’un d’eux était l’une de mes héroïnes d’enfance, Sunita Williams. Voir des années de travail fonctionner réellement dans l’espace et la regarder là-bas pendant que le robot se déplaçait était incroyable. »
L’avenir des robots en orbite
Après leur expérience sur l’ISS, le système d’amorçage chaud de l’équipe a atteint le niveau de maturité technologique 5 (TRL 5), une désignation de la NASA indiquant un test réussi dans un environnement opérationnel réel. Cette mise à niveau indique que cette technologie présente un faible risque, ce qui est important pour proposer de nouvelles expériences ou de futures missions.
Pour l’avenir, Banerjee a déclaré que ce type d’IA mathématiquement fondée et axée sur la sécurité sera crucial à mesure que les robots assumeront plus de tâches de manière indépendante, et que la NASA enverra des missions habitées vers la Lune et Mars. Affirme-t-elle : « À mesure que les robots s’éloigneront de la Terre et que les missions deviendront plus fréquentes et moins coûteuses, nous ne pourrons pas toujours les téléopérer depuis le sol. » De telles technologies permettront aux astronautes de se concentrer sur un travail de plus haute priorité et d’utiliser leur temps plus efficacement. Conclut-elle : « L’autonomie avec des garanties intégrées n’est pas seulement utile ; elle est essentielle pour l’avenir de la robotique spatiale. »
Pavone a souligné que son laboratoire continuera à rechercher et à faire progresser les techniques d’amorçage chaud. Déclare-t-il : « Dans le cadre du Center for Aerospace Autonomy Research (CAESAR), nous collaborons avec le Stanford Space Rendezvous Lab pour explorer des modèles d’IA plus puissants – les mêmes types que ceux utilisés dans les outils linguistiques modernes et les systèmes de conduite autonome. Avec des capacités de généralisation plus fortes, ces modèles permettraient aux robots de naviguer dans des situations encore plus difficiles lors des futures missions spatiales. »
Article : Transformers for Trajectory Optimization with Application to Spacecraft Rendezvous – DOI : 10.48550/arXiv.2310.13831
Abhishek Cauligi, PhD ’21, est également co-auteur de l’article. Pavone est également professeur associé, par courtoisie, de génie électrique et d’informatique à la School of Engineering. Il est également chercheur principal au Precourt Institute for Energy, affilié facultaire au Institute for Human-Centered Artificial Intelligence, et membre de l’Institute for Computational and Mathematical Engineering.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.