L’innovation technologique s’inspire souvent du vivant. Un drone récemment présenté dans une étude scientifique emprunte ses principes de vol à l’écureuil volant, un petit mammifère capable de glisser entre les arbres avec une agilité surprenante. Cet engin, conçu par une équipe de chercheurs, repousse les frontières de la maniabilité aérienne grâce à des ailes déformables et un système de contrôle inédit. Une avancée qui pourrait transformer les capacités des drones dans des environnements complexes.
| Points forts |
|---|
Un drone inspiré de l’écureuil volant, combine des ailes pliables et un contrôle aérodynamique avancé. Une coordination en temps réel entre la poussée des moteurs et le déploiement des ailes pour une maniabilité optimale. Une modélisation hybride (physique + données) permet de prédire le comportement des ailes déformables. Une surveillance en zones accidentées, livraison en milieux hostiles, exploration de sites inaccessibles. Des limitations énergétiques, adaptation aux conditions météorologiques extrêmes, optimisation des matériaux. |
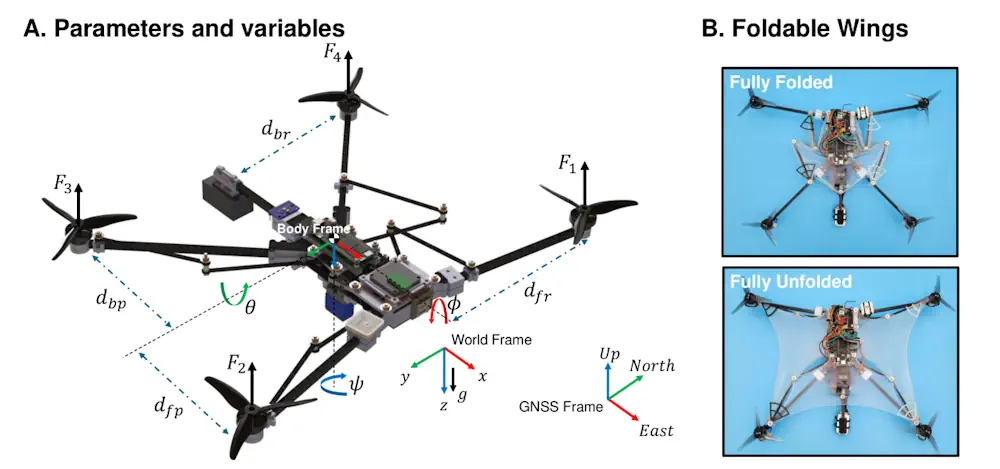
Le dispositif se distingue par une structure minimaliste et optimisée.
Pesant 548 grammes, il mesure 27,6 cm de longueur pour une envergure de 37,3 cm. Les ailes, en silicone, ne représentent que 4,4 % de la masse totale, un choix stratégique pour maximiser la réactivité. Le corps et les bras de soutien, en fibre de carbone, offrent une rigidité nécessaire pour résister aux forces aérodynamiques, tandis que le silicone permet une adaptation dynamique du profil des ailes. Cette déformation contrôlée optimise en temps réel la portance et la traînée.
Les capteurs embarqués — deux unités de mesure inertielle (IMU), un baromètre, et un récepteur GNSS — collaborent avec une unité de contrôle STM32H747 à double cœur. Cette puce, associée à une batterie LiPo haute performance, alimente quatre moteurs T-motor 2004 et deux servomoteurs MG92B, garantissant une réponse instantanée.
TWCC : L’orchestration parfaite de la Poussée et de l’Aérodynamisme
Le système de contrôle TWCC (Thrust-Wing Coordination Control) coordonne la poussée des moteurs et le déploiement des ailes. Trois modules interdépendants composent cette intelligence artificielle :
WOEG (Wing Operation Event Generator) : Ce module évalue en permanence l’efficacité potentielle des ailes. En comparant le vecteur normal du drone avec les forces aérodynamiques estimées, il active les ailes si cela améliore une manœuvre (freinage, virage) ou les replie pour éviter les perturbations. Le WOEG utilise deux méthodes pour estimer ces forces : une modélisation simplifiée d’aile plane et un réseau neuronal récurrent (paRNN), capable d’apprendre le comportement complexe du silicone en vol.
WIIC (Wing-Informed Integration Controller) : Il intervient lorsque les angles de roulis ou de tangage demandés excèdent les limites physiques. Il ajuste la trajectoire en combinant la poussée des moteurs et les forces générées par les ailes, assurant une transition fluide entre contrôle traditionnel et assistance aérodynamique.
Contrôleur Principal (PC) : Basé sur des algorithmes PID, il supervise la stabilité générale, même lorsque le WIIC est actif, pour corriger les écarts par rapport à la trajectoire planifiée.
Ce système opère à une fréquence de 10 Hz, ajustant les paramètres dix fois par seconde pour compenser les rafales de vent ou les perturbations imprévues.
La modélisation des ailes en silicone est un défi majeur. Contrairement aux ailes rigides, leur déformation rend inefficaces les équations classiques. Le réseau neuronal récurrent assisté par la physique (paRNN) fusionne des données expérimentales (vols réels) avec des principes aérodynamiques fondamentaux. Ce modèle apprend à prédire l’angle d’attaque optimal, améliorant la précision des estimations de portance et de traînée.
Validation expérimentale : des résultats concluants
Des tests en extérieur ont évalué les performances du drone sur des trajectoires complexes, avec des obstacles virtuels à éviter. L’erreur quadratique moyenne (RMSE) a mesuré l’écart entre la route prévue et celle effectuée. Résultat : une réduction de 13,1 % de la RMSE comparé à un drone sans ailes, confirmant l’avantage du TWCC.
Malgré ces succès, des défis subsistent : autonomie limitée par la batterie actuelle, impact des conditions météorologiques extrêmes, et adaptation aux environnements urbains. Les chercheurs envisagent d’optimiser le TWCC, d’expérimenter de nouveaux matériaux pour les ailes, et d’étendre les applications à la surveillance ou la livraison en zones hostiles.
Ce drone biomimétique illustre comment l’ingénierie peut repousser les limites de la technologie en s’inspirant de la nature. Bien que des améliorations soient nécessaires, il ouvre des perspectives encourageantes pour des applications exigeantes, de l’exploration de sites inaccessibles à la logistique en milieu hostile. Une étape clé vers un avenir où les drones deviendront des partenaires incontournables dans des scénarios toujours plus complexes.
Lexique
- TWCC (Contrôle de Coordination Poussée-Ailes) : Système de contrôle coordonnant la poussée des moteurs et le déploiement des ailes pour optimiser la stabilité et l’agilité.
- paRNN (Réseau Neuronal Récurrent Assisté par la Physique) : Modèle d’IA combinant des principes aérodynamiques et des données expérimentales pour prédire le comportement des ailes en silicone.
- RMSE (Erreur Quadratique Moyenne) : Métrique statistique mesurant l’écart entre la trajectoire planifiée et la trajectoire réelle du drone.
- Ailes en silicone déformables : Structures souples modifiant leur profil aérodynamique en temps réel pour s’adapter aux manœuvres.
- Contrôle PID (Proportionnel-Intégral-Dérivé) : Algorithme de régulation ajustant en continu la poussée et les angles de vol pour maintenir la stabilité.
- Matériaux composites : Utilisation de fibre de carbone pour le corps et les bras, alliant légèreté et rigidité.
- Capteurs IMU (Unités de Mesure Inertielle) : Dispositifs mesurant l’accélération, la vitesse angulaire et l’orientation du drone.
- Manœuvres aériennes complexes : Freinages brusques, virages serrés, et évitement d’obstacles rendus possibles par le TWCC.
- Biomimétique : Approche d’ingénierie s’inspirant des mécanismes naturels (ex. vol de l’écureuil) pour résoudre des défis techniques.
Dohyeon Lee et al, « A highly maneuverable flying squirrel drone with agility-improving foldable wings », arXiv (2025). DOI: 10.48550/arxiv.2504.09609