Les petits véhicules sous-marins autonomes, comme les drones de la mer, pourraient être très utiles pour étudier les profondeurs de l’océan et surveiller ses conditions changeantes. Mais ces mini-robots nautiques peuvent être facilement dépassés par les courants océaniques turbulents.
Les scientifiques du Caltech, sous la direction de John Dabiri, Professeur d’aéronautique et de génie mécanique, ont tiré parti de la capacité naturelle des méduses à traverser et à sonder l’océan, en les équipant d’appareils électroniques et de « chapeaux » prothétiques grâce auxquels les créatures peuvent transporter de petites charges utiles au cours de leurs voyages nautiques et rapporter leurs découvertes à la surface. Ces méduses bioniques doivent faire face au flux et au reflux des courants qu’elles rencontrent, mais ces créatures sans cerveau ne prennent pas de décisions sur la meilleure façon de naviguer vers une destination, et une fois qu’elles sont déployées, elles ne peuvent pas être contrôlées à distance.
« Nous savons que les méduses augmentées peuvent être d’excellents explorateurs des océans, mais elles n’ont pas de cerveau », indique M. Dabiri. « L’une des choses sur lesquelles nous avons travaillé est donc de développer ce à quoi ressemblerait ce cerveau si nous devions doter ces systèmes de la capacité de prendre des décisions sous l’eau. »
Aujourd’hui, Dabiri et son ancien étudiant diplômé Peter Gunnarson, qui est maintenant à l’université Brown, ont trouvé un moyen de simplifier ce processus de prise de décision et d’aider un robot, ou potentiellement une méduse augmentée, à se laisser porter par les tourbillons turbulents créés par les courants océaniques plutôt que de lutter contre eux.
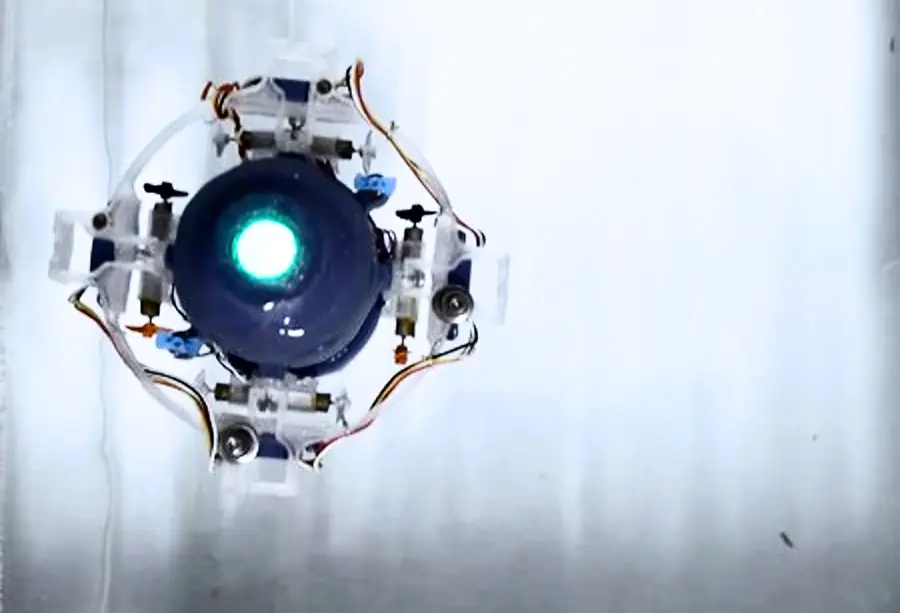
Pour ce travail, Gunnarson a fait appel à un vieil ami du laboratoire : CARL-Bot (Caltech Autonomous Reinforcement Learning roBot). M. Gunnarson a construit le CARL-Bot il y a plusieurs années dans le cadre de ses travaux visant à intégrer l’intelligence artificielle dans la technique de navigation d’un tel robot. Mais il a récemment trouvé un moyen plus simple que l’intelligence artificielle pour qu’un tel système prenne des décisions sous l’eau.
« Nous réfléchissions à la manière dont les véhicules sous-marins pourraient utiliser les courants turbulents pour se propulser et nous nous sommes demandé si, au lieu d’être un problème, ils ne pourraient pas être un avantage pour ces petits véhicules », explique M. Gunnarson.
M. Gunnarson voulait comprendre exactement comment un courant pousse un robot. Il a fixé un propulseur à la paroi d’un réservoir de 16 pieds de long dans le laboratoire de Dabiri au sein du laboratoire aéronautique Guggenheim sur le campus de Caltech afin de générer de manière répétée ce que l’on appelle des anneaux de vortex, qui sont en fait les équivalents sous-marins des ronds de fumée. Les anneaux tourbillonnaires représentent bien les types de perturbations qu’un explorateur sous-marin pourrait rencontrer dans l’écoulement chaotique des fluides de l’océan.
M. Gunnarson a commencé à utiliser l’unique accéléromètre embarqué du CARL-Bot pour mesurer la façon dont il se déplaçait et était poussé par les anneaux tourbillonnaires. Il a remarqué que, de temps en temps, le robot était pris dans un anneau de vortex et poussé à travers le réservoir. Avec ses collègues, il s’est demandé s’il était possible d’obtenir cet effet de manière intentionnelle.
Pour explorer cette possibilité, l’équipe a mis au point des commandes simples permettant à CARL de détecter l’emplacement relatif d’un anneau tourbillonnaire et de se positionner pour, selon les termes de M. Gunnarson, « monter à bord et traverser gratuitement le bassin ». Le robot peut également décider de s’écarter d’un anneau de vortex par lequel il ne veut pas être poussé.
M. Dabiri souligne que ce processus comprend des éléments de biomimétisme, qui s’inspirent de la nature. Les oiseaux planeurs, par exemple, profitent souvent des vents forts pour économiser de l’énergie plutôt que d’essayer de voler contre eux. Des expériences ont également montré que les poissons peuvent se laisser porter par les courants tourbillonnants de l’océan afin d’économiser de l’énergie. Toutefois, dans ces deux cas naturels, les systèmes utilisent des données sensorielles relativement sophistiquées et un cerveau pour y parvenir.
« Ce que Peter a découvert, c’est qu’avec un seul capteur, cet accéléromètre, et des lois de contrôle relativement simples, nous pouvons obtenir des avantages similaires en termes d’utilisation de l’énergie de l’environnement pour aller d’un point A à un point B », explique M. Dabiri.
Pour l’avenir, M. Dabiri espère combiner ce travail avec sa méduse hybride. « Avec la méduse, nous pouvons utiliser un accéléromètre embarqué pour mesurer la façon dont le système est poussé », explique-t-il. « Nous espérons pouvoir démontrer une capacité similaire à tirer parti des flux environnementaux pour se déplacer plus efficacement dans l’eau. »
L’article de PNAS Nexus est intitulé « Surfing vortex rings for energy-efficient propulsion » (Surfer sur les anneaux tourbillonnaires pour une propulsion économe en énergie). Les travaux ont été soutenus par la National Science Foundation.
Source / Crédit : Caltech
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.