Des chercheurs sud-coréens ont mis au point une roue révolutionnaire capable de s’adapter instantanément à son environnement. Cette innovation pourrait transformer radicalement la mobilité des personnes à mobilité réduite et améliorer les performances des robots mobiles.
L’Institut coréen de machinerie et de matériaux (KIMM) a développé une roue morphique à rigidité variable, s’inspirant de la tension superficielle d’une goutte de liquide. Cette innovation représente une avancée significative dans le domaine de la robotique mobile et des systèmes de transport.
La roue conçue par l’équipe du KIMM peut modifier sa rigidité sans recourir à des mécanismes complexes ou des capteurs. Elle fonctionne comme une roue circulaire rigide sur terrain plat, mais peut devenir souple et déformable pour franchir des obstacles.
Un mécanisme ingénieux
La roue morphique se compose de blocs de chaîne intelligents et d’une structure flexible. Le bord extérieur de la roue est constitué de blocs de chaîne intelligents, reliés au moyeu central par des rayons en fil métallique. La rotation du moyeu ou le changement de distance entre les éléments modifie la tension des rayons, altérant ainsi la tension superficielle de la structure de blocs de chaîne intelligents.
Lorsque les rayons tirent les blocs vers l’intérieur, la force de traction à la surface augmente. Ce phénomène est comparable à l’augmentation de la tension superficielle d’une goutte de liquide, qui permet à celle-ci de maintenir une forme circulaire stable. À l’inverse, le relâchement des rayons diminue la rigidité de la roue.
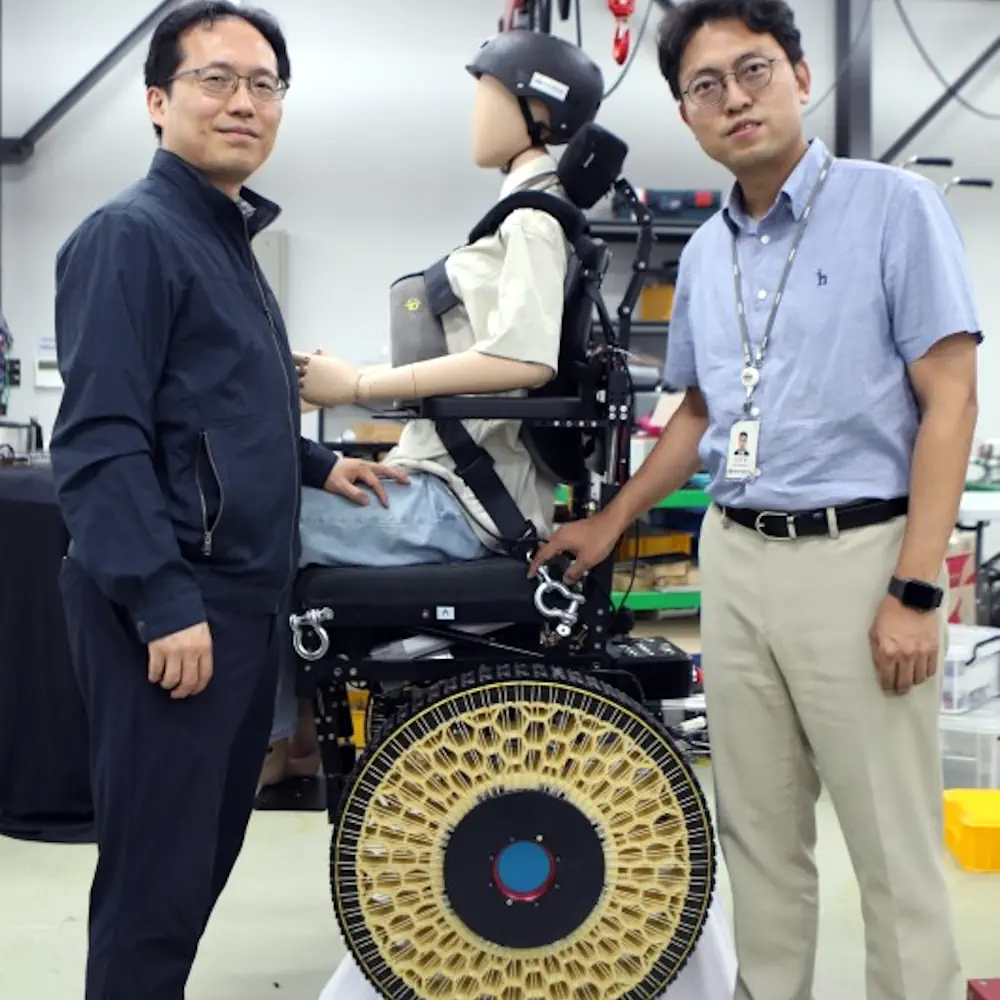
L’équipe du KIMM a réussi à miniaturiser et alléger le mécanisme de rigidité variable, l’intégrant à l’intérieur de la roue. Cette modularisation permet d’appliquer facilement la technologie à divers systèmes mobiles, comme un fauteuil roulant à deux roues.
Sur ce fauteuil, la rigidité des roues peut être modifiée en temps réel, offrant une stabilité accrue et une meilleure maniabilité dans les espaces restreints. Le fauteuil peut franchir des obstacles tels que des rochers ou des marches de 18 centimètres de haut.
Le chercheur principal Sung-Hyuk Song du KIMM a indiqué : «La nouvelle roue morphique est significative car elle permet de surmonter des obstacles tout en maintenant une efficacité de déplacement élevée, comparable aux roues conventionnelles.»
Des performances impressionnantes
En appliquant cette technologie à un système mobile à quatre roues, l’équipe du KIMM a confirmé que la roue peut franchir de manière stable des obstacles jusqu’à 1,3 fois plus hauts que son rayon. Cette capacité dépasse largement les limites des roues traditionnelles.
«Cette nouvelle technologie de roues morphiques inspirée de la tension superficielle peut aider à surmonter les limitations des dispositifs mécaniques conventionnels tels que les robots à pattes et les groupes de roues pour franchir des obstacles.» a ajouté Dong Il Park, responsable du Centre de recherche en robotique avancée du KIMM.
La roue morphique développée par le KIMM offre plusieurs avantages par rapport aux technologies existantes. Contrairement aux pneus non pneumatiques flexibles, elle ne se déforme pas en permanence sur les surfaces planes, ce qui préserve l’efficacité et la stabilité de la conduite tout en réduisant le bruit.
Cette innovation pourrait trouver des applications dans de nombreux domaines, notamment :
– Les fauteuils roulants intelligents
– Les robots mobiles pour l’industrie et les services
– Les véhicules de mobilité personnelle adaptés aux environnements urbains complexes
La recherche a été publiée en couverture du numéro d’août 2024 de «Science Robotics», une revue scientifique de premier plan dans le domaine de la robotique. Elle s’inscrit dans le cadre d’un projet visant à développer des robots d’assistance pour les personnes paraplégiques.
Cette roue morphique inspirée de la nature illustre comment la biomimétique peut conduire à des innovations technologiques majeures. En s’adaptant instantanément à son environnement, elle pourrait améliorer considérablement la mobilité des personnes handicapées et les performances des robots mobiles dans des environnements complexes.
Légende illustration : La roue morphing à rigidité variable inspirée par la tension superficielle, développée par le centre de recherche en robotique avancée de l’institut de recherche en robotique IA du KIMM, surmonte un rocher. Credit: Korea Institute of Machinery and Materials (KIMM)
Article : « Variable-stiffness–morphing wheel inspired by the surface tension of a liquid droplet » – DOI:10.1126/scirobotics.adl2067