Au cœur du laboratoire robotique de l’ETH Zurich, une équipe de chercheurs se livre à une expérience fascinante : enseigner à un robot quadrupède, baptisé ANYmal, l’art complexe du badminton. Bien plus qu’une prouesse spectaculaire, cet exploit marque une avancée dans la coordination homme-machine, repoussant les frontières des capacités de l’intelligence artificielle et des systèmes de contrôle automatisés. À travers le jeu, c’est tout un pan de la robotique moderne qui se donne à voir, entre apprentissage, adaptation constante et défis techniques inédits.
Apprendre à voir, bouger et frapper : le défi technique
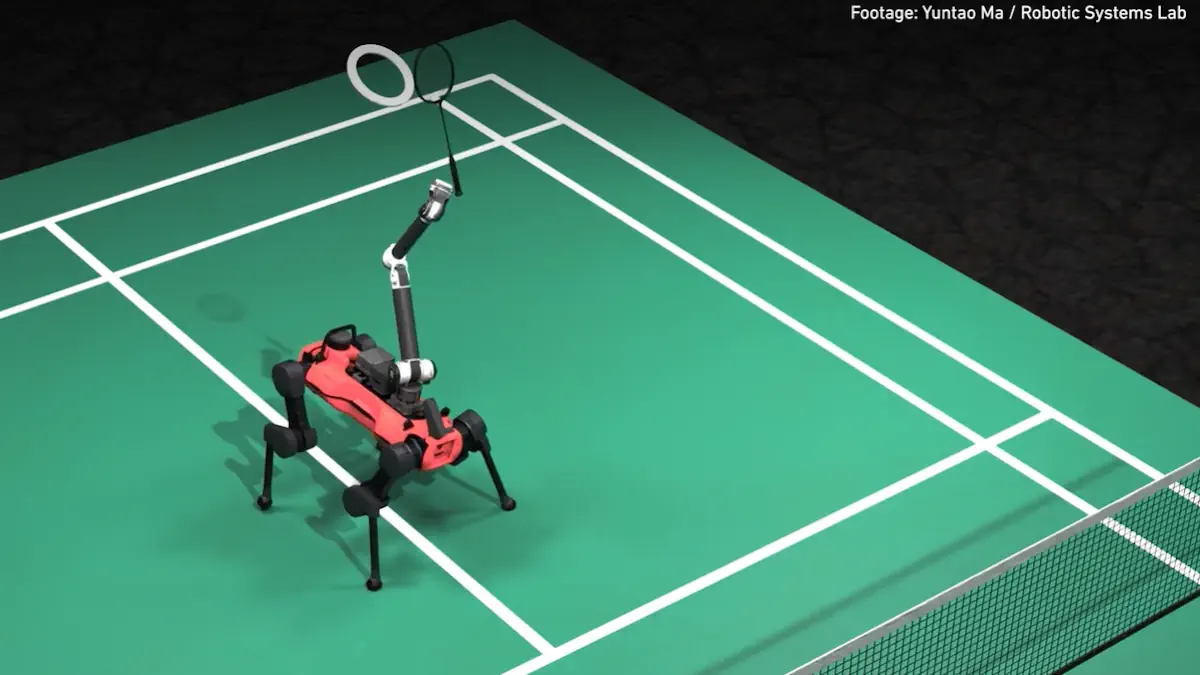
Le cœur du défi consiste à synchroniser la vision, le mouvement des jambes et le maniement de la raquette. ANYmal, doté de quatre jambes et de deux caméras, doit non seulement repérer le volant de badminton mais également anticiper sa trajectoire, s’approcher du point d’impact, puis exécuter le geste juste pour le renvoyer. Cette coordination en temps réel nécessite une précision remarquable.
Dès le départ, les ingénieurs ont fait le choix de doter le robot d’une perception visuelle inspirée de la vision humaine : les caméras scrutent la couleur du volant, identifient sa position, puis confient aux algorithmes embarqués l’analyse mathématique des mouvements à réaliser.
L’apprentissage par renforcement : la clef du progrès
Pour atteindre ce niveau d’autonomie, les chercheurs de l’ETH Zurich, sous la direction du professeur Marco Hutter, se sont appuyés sur le principe du « reinforcement learning », ou apprentissage par renforcement. Concrètement, ANYmal a multiplié les essais et les erreurs dans un environnement de simulation, totalisant des milliers d’itérations rapides. Cet entraînement virtuel a permis au robot de perfectionner ses stratégies et de progresser beaucoup plus vite qu’un entraînement physique classique.
La pratique du sport, particulièrement exigeante en matière de réactivité et d’ajustement dynamique, impose de repousser constamment les limites du contrôle-commande robotique. À chaque difficulté surmontée, l’équipe affine non seulement l’algorithme, mais également la conception mécanique pour atteindre un niveau de performance supérieur.
Un robot joueur, mais encore loin du niveau humain
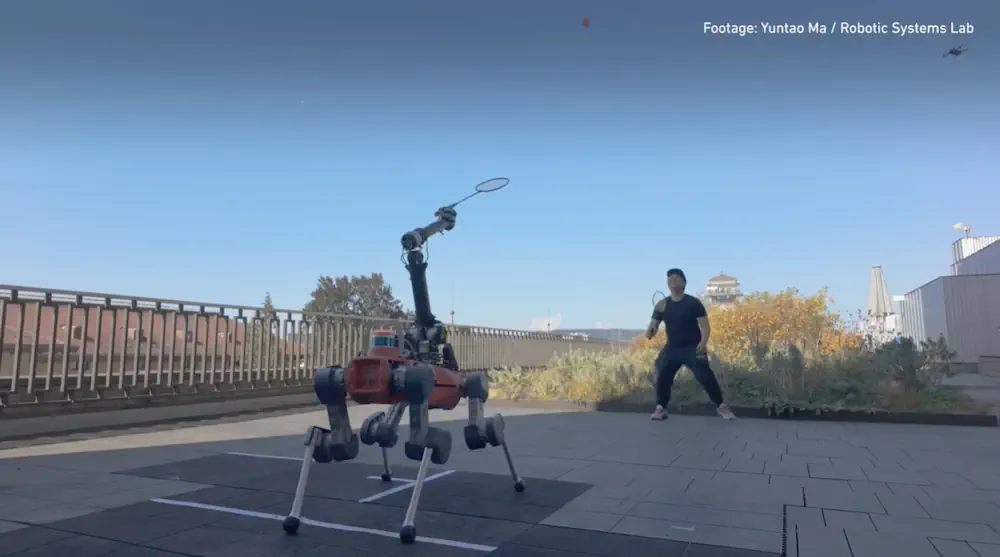
Aujourd’hui, les parties opposant ANYmal à des joueurs humains relèvent davantage du match amical. Comparativement à un enfant de sept ans affrontant un adulte, le robot montre des aptitudes prometteuses, sans toutefois rivaliser avec la rapidité et la plasticité des humains expérimentés. Ce résultat, s’il peut sembler modeste, augure cependant d’un potentiel considérable. Les ajustements développés sur le terrain du badminton pourront bientôt irriguer d’autres secteurs de la robotique, du secours en milieu périlleux à l’assistance domestique, où la complexité des environnements exige de subtiles adaptations.
Ce robot qui apprend le badminton ouvre une nouvelle voie pour l’intelligence artificielle appliquée à la robotique mobile et interactive. Loin de se limiter à la simple performance sportive, l’expérience constitue un laboratoire pour comprendre comment les machines sont en mesure de s’intégrer dans nos pratiques humaines, en apprenant, en s’ajustant, et en interagissant en temps réel.
Ma Y, Cramariuc A, Farshidian F, Hutter M. Learning coordinated badminton skills for legged manipulators. Science Robotics, 10 (2025), doi: 10.1126/scirobotics.adu3922
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.