
Une équipe de chercheurs canadiens a mis au point des matériaux intelligents et avancés qui constitueront les éléments fondamentaux d’une future génération de micro-robots médicaux souples. Ces minuscules robots pourraient révolutionner le domaine médical en permettant des interventions chirurgicales minimales.
Les micro-robots, d’une longueur maximale d’un centimètre, ont le potentiel de réaliser des procédures médicales, telles que des biopsies, et le transport de cellules et de tissus, de manière minimale. Ils peuvent se déplacer dans des environnements confinés et inondés, comme le corps humain, et livrer des cargaisons délicates et légères, telles que des cellules ou des tissus, à une position cible.
Les microrobots sont fabriqués à partir de composites d’hydrogel avancés qui comprennent des nanoparticules de cellulose durables dérivées de plantes. Ils sont biocompatibles et non toxiques, ce qui les rend idéaux pour une utilisation dans le corps humain.
Une approche holistique de la conception des micro-robots
La recherche, dirigée par Hamed Shahsavan, professeur au département de génie chimique, présente une approche holistique de la conception, de la synthèse, de la fabrication et de la manipulation des microrobots. L’hydrogel utilisé dans ce travail change de forme lorsqu’il est exposé à une stimulation chimique externe.
La capacité d’orienter les nanoparticules de cellulose à volonté permet aux chercheurs de programmer ce changement de forme, ce qui est crucial pour la fabrication de robots souples fonctionnels.
« Dans mon groupe de recherche, nous faisons le pont entre l’ancien et le nouveau », a précisé le Prof. Shahsavan, directeur du laboratoire de matériaux intelligents pour les technologies robotiques avancées (SMART-Lab). « Nous introduisons des microrobots émergents en exploitant des matières molles traditionnelles comme les hydrogels, les cristaux liquides et les colloïdes. »
Un matériau intelligent et auto-réparant
Un autre composant unique de ce matériau intelligent avancé est qu’il est auto-réparant, ce qui permet de programmer une large gamme de formes pour les robots. Les chercheurs peuvent couper le matériau et le recoller sans utiliser de colle ou d’autres adhésifs pour former différentes formes pour différentes procédures.
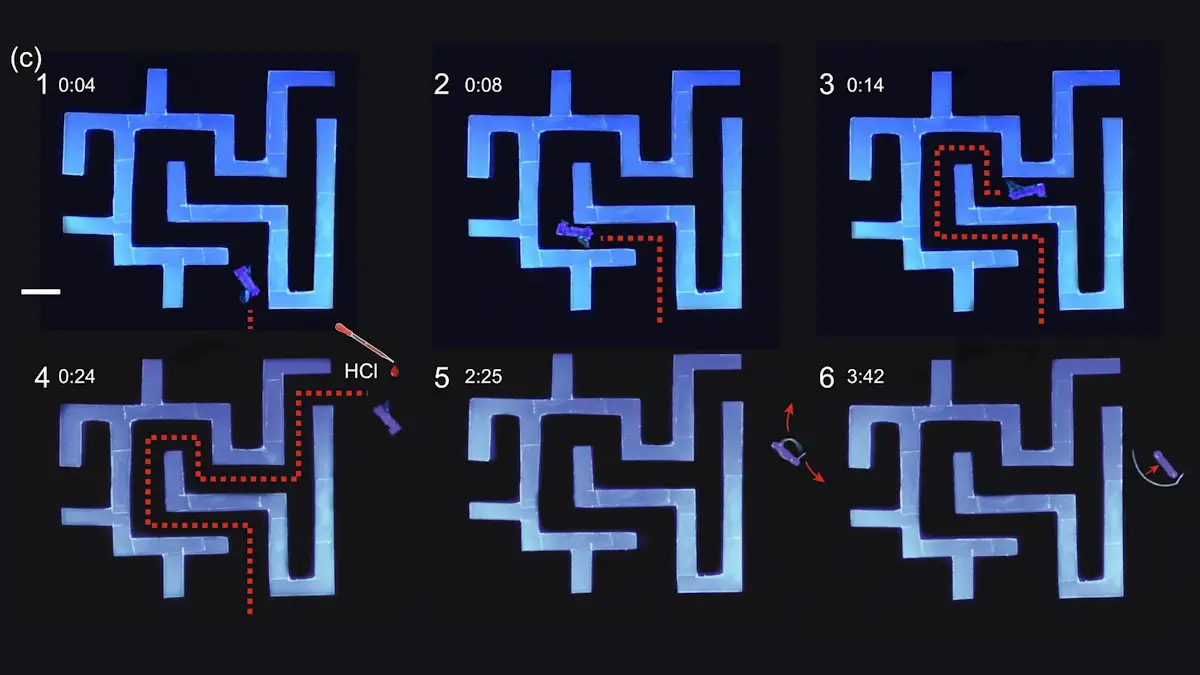
Le matériau peut être encore modifié avec un magnétisme qui facilite le mouvement des robots souples à travers le corps humain. Comme preuve de concept de la manière dont le robot se déplacerait à travers le corps, le minuscule robot a été déplacé à travers un labyrinthe par des chercheurs contrôlant son mouvement à l’aide d’un champ magnétique.
Le rôle crucial des ingénieurs chimistes
« Les ingénieurs chimistes jouent un rôle crucial dans la poussée des frontières de la recherche en microrobotique médicale », a conclu le Prof. Shahsavan. « Il est intéressant de noter que pour relever les nombreux défis majeurs en microrobotique, il faut posséder les compétences et les connaissances que possèdent les ingénieurs chimistes, y compris le transfert de chaleur et de masse, la mécanique des fluides, l’ingénierie des réactions, les polymères, la science des matières molles et les systèmes biochimiques. Nous sommes donc en position unique pour introduire des voies innovantes dans ce domaine émergent ».
En synthèse
La prochaine étape de cette recherche est de réduire l’échelle du robot à des échelles submillimétriques. Ces travaux ouvrent la voie à une nouvelle génération de microrobots médicaux qui pourraient transformer la manière dont nous réalisons des procédures médicales, en rendant ces interventions moins invasives et plus précises.
Pour une meilleure compréhension
Qu’est-ce que les microrobots médicaux?
Les microrobots médicaux sont de minuscules robots, d’une longueur maximale d’un centimètre, qui ont le potentiel de réaliser des procédures médicales minimales, comme des biopsies et le transport de cellules et de tissus.
De quoi sont faits ces microrobots?
Les microrobots sont fabriqués à partir de composites d’hydrogel avancés qui comprennent des nanoparticules de cellulose durables dérivées de plantes. Ils sont biocompatibles et non toxiques.
Comment ces microrobots sont-ils conçus et fabriqués?
La conception, la synthèse, la fabrication et la manipulation des microrobots sont réalisées de manière holistique. L’hydrogel utilisé change de forme lorsqu’il est exposé à une stimulation chimique externe, ce qui permet de programmer le changement de forme du robot.
Quelle est la particularité de ces microrobots?
Un composant unique de ces microrobots est leur capacité à s’auto-réparer. Les chercheurs peuvent couper le matériau et le recoller sans utiliser de colle ou d’autres adhésifs pour former différentes formes pour différentes procédures.
Quelle est la prochaine étape de cette recherche?
La prochaine étape de cette recherche est de réduire l’échelle du robot à des échelles submillimétriques.
Légende illustration principale : Un micro-robot qui transfère une cargaison en forme de I en tournant autour d’elle, déclenché par l’augmentation du pH. Le micro-robot est piloté et dirigé à distance par un aimant. La diminution du pH déclenche l’ouverture du micro-robot et la libération de la cargaison. Notez que le processus de saisie de la cargaison n’est pas entièrement sans contact et que nous avons dû diriger manuellement la cargaison au bon endroit. Une étape de saisie entièrement sans contact nécessite un contrôle actif du positionnement du ruban torsadé, ce qui n’entre pas dans le cadre de ce travail. La barre d’échelle est de 10 mm.
Le groupe de recherche de Hamed Shahsavan a collaboré avec Tizazu Mekonnen, professeur au département de génie chimique de Waterloo, Shirley Tang, vice-doyenne de la faculté des sciences (recherche), et Amirreza Aghakhani, professeur à l’université de Stuttgart, en Allemagne. Ils ont publié leurs résultats le mois dernier dans la revue Nature Communications.














