Dans l’univers de la robotique, une nouvelle tendance émerge : les robots doux, inspirés par la biologie humaine. Ces machines, loin d’être de simples assemblages de métal et de moteurs, sont conçues pour être plus souples et adaptables, ouvrant ainsi la voie à une interaction totalement différente avec leur environnement.
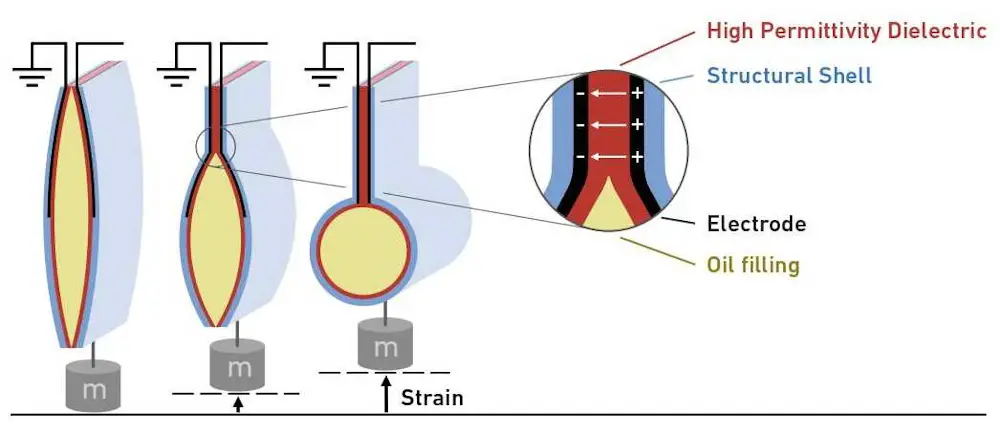
Les muscles artificiels s’inspirent de la biologie. À l’instar de leurs homologues naturels, ils se contractent en réponse à une impulsion électrique. Ces muscles artificiels ne sont pas constitués de cellules et de fibres, mais d’une poche remplie d’un liquide (généralement de l’huile), dont la coque est partiellement recouverte d’électrodes.
Lorsque ces électrodes reçoivent une tension électrique, elles se rapprochent et poussent le liquide dans le reste de la poche, qui se courbe et est ainsi capable de soulever un poids. Un seul de ces sacs est analogue à un court faisceau de fibres musculaires ; plusieurs de ces sacs peuvent être connectés pour former un élément de propulsion complet, également appelé un actionneur ou simplement un muscle artificiel.
Le défi de la haute tension
L’idée de développer des muscles artificiels n’est pas nouvelle, mais jusqu’à présent, un obstacle majeur se dressait : les actionneurs électrostatiques ne fonctionnaient qu’avec des tensions extrêmement élevées, de l’ordre de 6 000 à 10 000 volts. Cela avait plusieurs conséquences : par exemple, les muscles devaient être connectés à de grands amplificateurs de tension lourds ; ils ne fonctionnaient pas dans l’eau ; et ils n’étaient pas entièrement sûrs pour les humains.
Une nouvelle solution a été développée par Robert Katzschmann, professeur de robotique à l’ETH Zurich, en collaboration avec Stephan-Daniel Gravert, Elia Varini et d’autres collègues. Ils ont publié leur version d’un muscle artificiel qui offre plusieurs avantages dans la revue Science Advances.
Les actionneurs HALVE : une avancée majeure
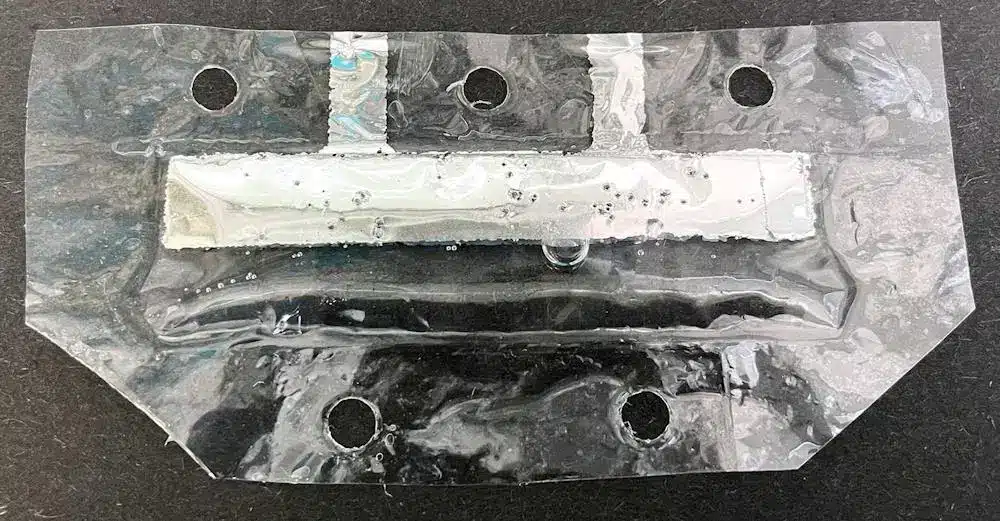
Stephan-Daniel Gravert, qui travaille comme assistant scientifique dans le laboratoire de Katzschmann, a conçu une coque pour la poche.
Les chercheurs appellent ces nouveaux muscles artificiels des actionneurs HALVE, où HALVE signifie «hydraulically amplified low-voltage electrostatic» (électrostatique à faible tension amplifiée hydrauliquement).
« Dans d’autres actionneurs, les électrodes sont à l’extérieur de la coque. Dans les nôtres, la coque est constituée de différentes couches. Nous avons pris un matériau ferroélectrique à haute permittivité, c’est-à-dire capable de stocker de grandes quantités d’énergie électrique, et nous l’avons combiné avec une couche d’électrodes. Ensuite, nous l’avons recouvert d’une coque en polymère qui a d’excellentes propriétés mécaniques et rend la poche plus stable », explique Stephan-Daniel Gravert.
Cela a permis aux chercheurs de réduire la tension requise, car la permittivité beaucoup plus élevée du matériau ferroélectrique permet de générer de grandes forces malgré une faible tension.
Les chercheurs n’ont pas seulement développé la coque pour les actionneurs HALVE, mais ils ont également construit les actionneurs eux-mêmes dans le laboratoire pour les utiliser dans deux robots.
Des applications concrètes : pinces et poissons
Un de ces exemples robotiques est une pince de 11 centimètres de haut avec deux doigts. Chaque doigt est actionné par trois poches de l’actionneur HALVE connectées en série. Une petite alimentation fonctionnant sur batterie fournit au robot 900 volts.
Ensemble, la batterie et l’alimentation ne pèsent que 15 grammes. La pince entière, y compris l’électronique de puissance et de contrôle, pèse 45 grammes.
La pince peut saisir un objet en plastique lisse assez fermement pour supporter son propre poids lorsque l’objet est soulevé dans les airs avec une corde.
« Cet exemple démontre parfaitement à quel point les actionneurs HALVE sont petits, légers et efficaces. Cela signifie également que nous nous sommes rapprochés de notre objectif de créer des systèmes intégrés actionnés par des muscles », ajoute Robert Katzschmann avec satisfaction.
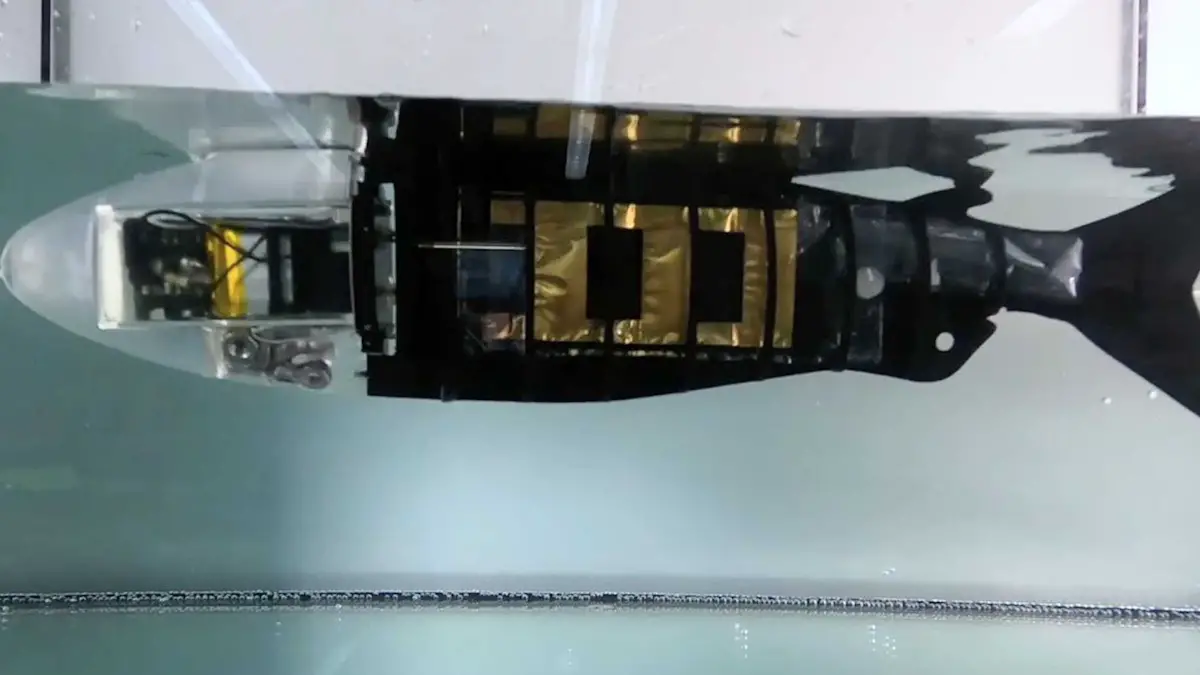
Le second objet est un nageur semblable à un poisson, long de près de 30 centimètres, qui peut se déplacer en douceur dans l’eau. Il est composé d’une «tête» contenant l’électronique et d’un « corps » flexible auquel sont attachés les actionneurs HALVE. Ces actionneurs se déplacent alternativement dans un rythme qui produit le mouvement de nage. Le poisson autonome peut passer de l’arrêt à une vitesse de trois centimètres par seconde en 14 secondes – et cela dans de l’eau du robinet normale.
Étanche et auto-obturant
Ce second exemple est important car il démontre une autre nouvelle caractéristique des actionneurs HALVE : comme les électrodes ne sont plus à l’extérieur de la coque sans protection, les muscles artificiels sont maintenant étanches et peuvent également être utilisés dans des liquides conducteurs.
« Le poisson illustre un avantage général de ces actionneurs – les électrodes sont protégées de l’environnement et, inversement, l’environnement est protégé des électrodes. Ainsi, vous pouvez faire fonctionner ces actionneurs électrostatiques dans l’eau ou les toucher, par exemple », explique Robert Katzschmann. Et la structure en couches des poches a un autre avantage : les nouveaux actionneurs sont beaucoup plus robustes que d’autres muscles artificiels.
Idéalement, les poches devraient être capables d’effectuer beaucoup de mouvements et de le faire rapidement. Cependant, même la plus petite erreur de production, comme un grain de poussière entre les électrodes, peut conduire à une panne électrique – une sorte de mini éclair.
« Dans les modèles précédents, lorsque cela se produisait, l’électrode brûlait, créant un trou dans la coque. Cela permettait au liquide de s’échapper et rendait l’actionneur inutilisable », ajoute pour sa part Stephan-Daniel Gravert.
Ce problème est résolu dans les actionneurs HALVE car un seul trou se ferme essentiellement de lui-même grâce à la couche extérieure en plastique protecteur. En conséquence, la poche reste généralement entièrement fonctionnelle même après une panne électrique.
Le futur des muscles artificiels
Les deux chercheurs sont clairement ravis d’avoir fait avancer le développement des muscles artificiels, mais ils restent également réalistes.
Comme le dit Robert Katzschmann, « Nous devons maintenant préparer cette technologie pour une production à plus grande échelle, et nous ne pouvons pas le faire ici, dans le laboratoire de l’ETH. Sans trop en dévoiler, je peux dire que nous recevons déjà des marques d’intérêt de la part d’entreprises qui aimeraient travailler avec nous ».
Par exemple, les muscles artificiels pourraient un jour être utilisés dans de nouveaux robots, des prothèses ou des wearables ; en d’autres termes, dans des technologies qui sont portées sur le corps humain.
Gravert SD, Varini E, Kazemipour A, Michelis MY, Buchner T, Hinchet R, Katzschmann RK: Low-voltage electrohydraulic actuators for untethered robotics. Science Advances, 5. Januar 2024, doi: 10.1126/sciadv.adi9319
Légende illustration : Muscles artificiels en action sous l’eau. (Photographie : capture d’écran de la vidéo de Gravert et al. Science 2024)
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.