Dans le secteur agricole, les pénuries de main-d’œuvre accroissent le besoin d’une récolte automatisée par des robots. Cependant, certains fruits, comme les tomates, sont délicats à récolter. Les tomates produisent généralement des fruits en grappes, ce qui oblige les robots à cueillir celles qui sont mûres tout en laissant les autres sur la vigne, ce qui exige des capacités avancées de prise de décision et de contrôle.
Pour apprendre aux robots à devenir cueilleurs de tomates, Takuya Fujinaga, professeur assistant à l’Université métropolitaine d’Osaka, École supérieure d’ingénierie, les a programmés pour évaluer la facilité de récolte de chaque tomate avant de tenter de la cueillir.
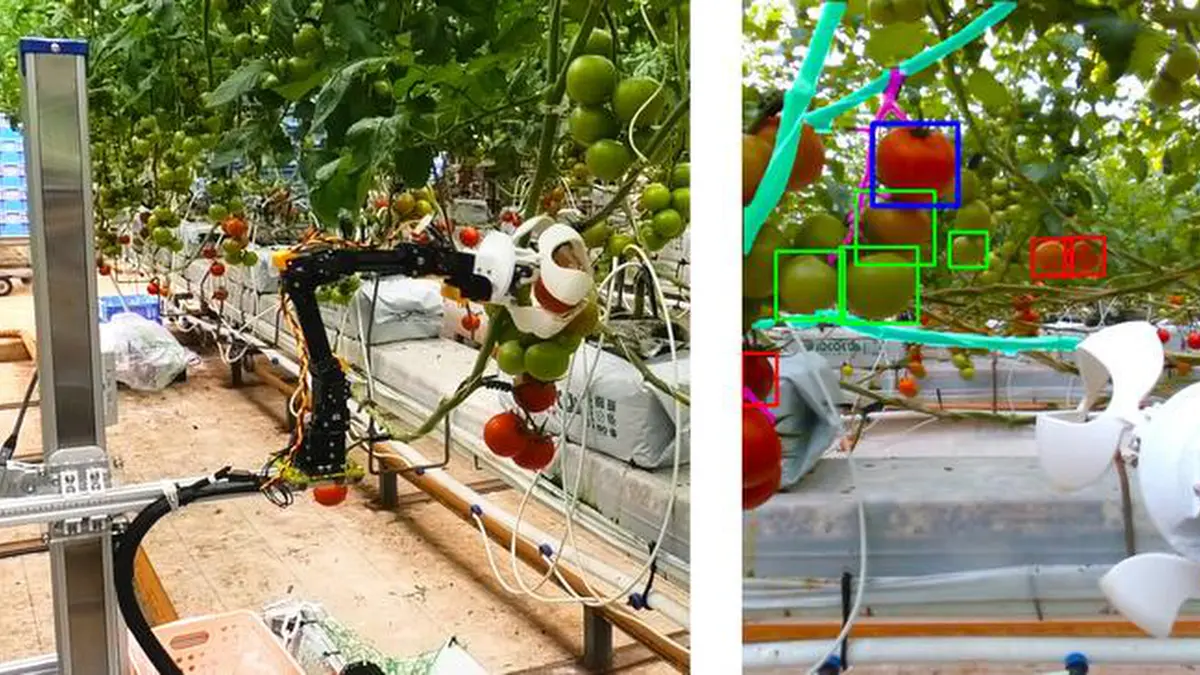
Le nouveau modèle de Fujinaga utilise la reconnaissance d’image couplée à une analyse statistique pour évaluer la direction d’approche optimale pour chaque fruit. Le système implique le traitement d’image/la vision du fruit, de ses tiges, et détermine s’il est caché derrière une autre partie de la plante. Ces facteurs informent les décisions de contrôle du robot et l’aident à choisir la meilleure approche.
Le modèle représente un changement d’orientation par rapport au modèle traditionnel de « détection/reconnaissance » vers ce que Fujinaga appelle une « estimation de la facilité de récolte ». « Cela va au-delà de la simple question ‘un robot peut-il cueillir une tomate ?’ pour réfléchir à ‘quelle est la probabilité d’une cueillette réussie ?’, ce qui est plus significatif pour l’agriculture réelle », a-t-il expliqué.
Lors des tests, le nouveau modèle de Fujinaga a démontré un taux de réussite de 81 %, bien au-dessus des prédictions. Il est à noter qu’environ un quart des réussites concernaient des tomates qui ont été récoltées avec succès par la droite ou la gauche, alors qu’une approche frontale avait précédemment échoué. Cela suggère que le robot a changé sa direction d’approche lorsqu’il a initialement eu du mal à cueillir le fruit.
En fin de compte, la recherche de Fujinaga met en lumière la subtilité impliquée dans la cueillette des fruits par les robots, des facteurs comme le regroupement des fruits, la géométrie des tiges, les feuilles en arrière-plan et l’occlusion étant tous importants. « Cette recherche établit la ‘facilité de récolte’ comme une métrique quantitativement évaluable, nous rapprochant d’un pas de la réalisation de robots agricoles capables de prendre des décisions éclairées et d’agir intelligemment », a-t-il affirmé.
Fujinaga envisage un avenir où les robots pourront déterminer de manière indépendante si les cultures sont prêtes à être récoltées. « Cela devrait inaugurer une nouvelle forme d’agriculture où robots et humains collaborent », a-t-il précisé. « Les robots récolteront automatiquement les tomates faciles à cueillir, tandis que les humains s’occuperont des fruits plus difficiles. »
Article : Realizing an Intelligent Agricultural Robot: An Analysis of the Ease of Tomato Harvesting – Journal : Smart Agricultural Technology – Méthode : Experimental study – DOI : 10.1016/j.atech.2025.101538
Source : OMU