La robotique modulaire franchit une étape significative avec le développement de composants hexagonaux innovants. Des chercheurs ont conçu des éléments robotiques reconfigurables, élargissant les horizons de la création de robots adaptables et multifonctionnels.
L’Institut Max Planck pour les Systèmes Intelligents a conçu des composants robotiques hexagonaux assemblables rapidement en robots performants. Le département des Matériaux Robotiques, dirigé par Christoph Keplinger, a doté chaque élément magnétique de muscles artificiels nommés HASELS, sensibles à l’application d’une tension électrique.
Ces modules, appelés HEXELS, se réarrangent facilement pour répondre à divers besoins. Les chercheurs envisagent également la conception de robots humanoïdes équipés de ces muscles artificiels.
Structure et mécanisme des HEXELS
L’exosquelette de chaque module HEXEL se compose de six plaques légères et rigides en fibre de verre. Les articulations internes des hexagones sont actionnées par des muscles artificiels HASEL (Hydraulically Amplified Self-healing Electrostatic). L’application d’une haute tension au module déclenche l’activation du muscle. Cette activation entraîne la rotation des articulations de l’hexagone, modifiant sa forme d’une configuration allongée à une forme élargie et aplatie.
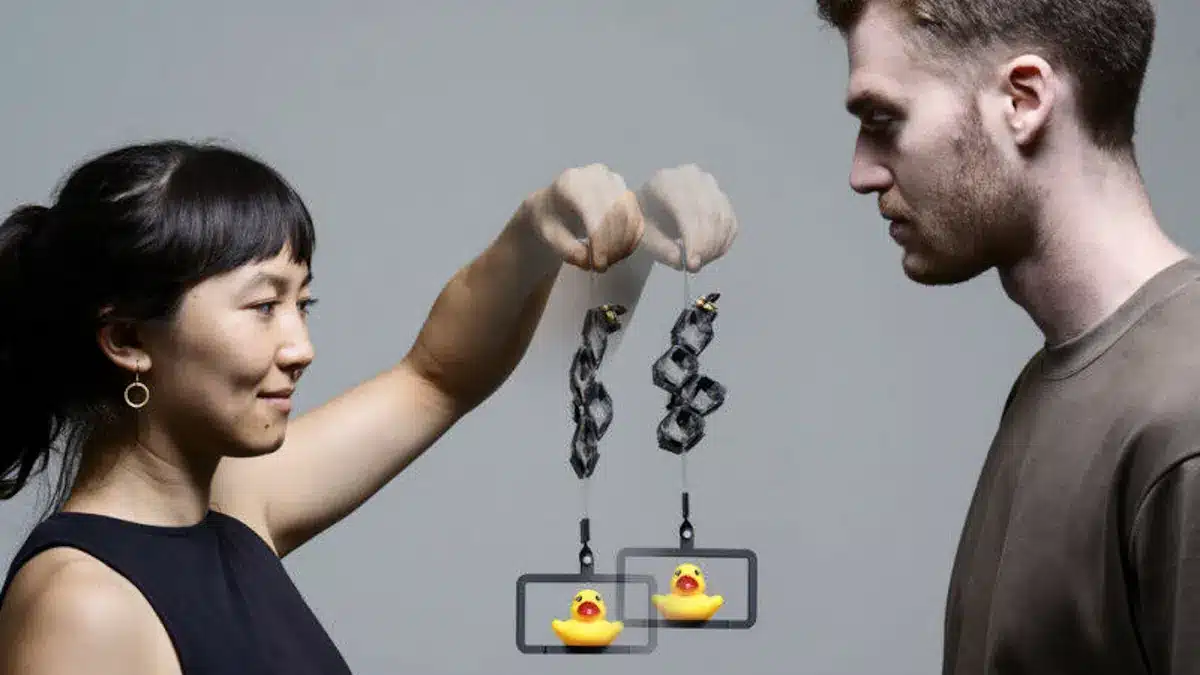
Ellen Rumley, chercheuse invitée de l’Université du Colorado Boulder, a expliqué : « En combinant ainsi des composants souples et rigides, il est possible d’obtenir des courses et des vitesses élevées. En connectant plusieurs modules, nous pouvons créer de nouvelles géométries de robots et les adapter à des besoins changeants« . Ellen Rumley et Zachary Yoder, doctorants au département des Matériaux Robotiques, sont les co-premiers auteurs de l’étude.
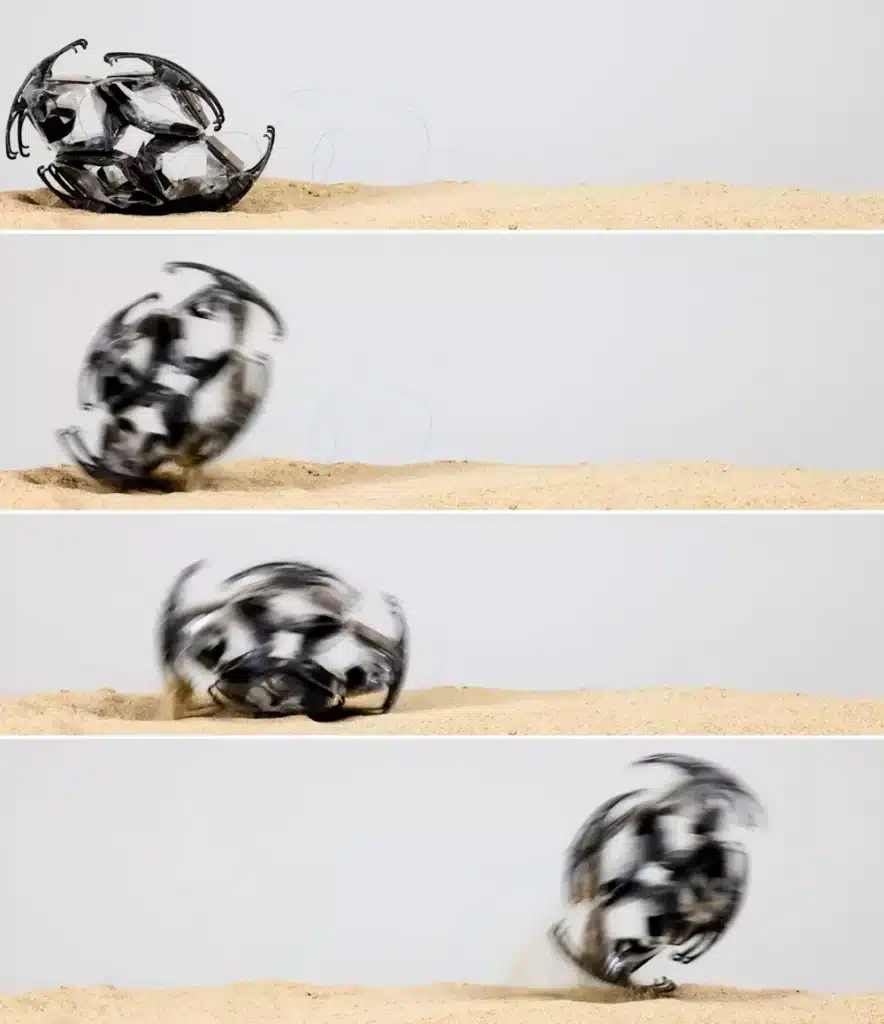
L’équipe a démontré la polyvalence des modules HEXEL. Un ensemble de modules se faufile dans un espace restreint, tandis qu’un module isolé s’active si rapidement qu’il bondit. Plusieurs modules s’assemblent en structures plus imposantes, générant divers mouvements selon leur configuration. Les chercheurs ont notamment créé un robot capable de rouler rapidement en combinant plusieurs modules.
Une approche durable de la robotique
Zachary Yoder a souligné l’intérêt des robots reconfigurables : « En général, il est très judicieux de développer des robots dotés de capacités reconfigurables. C’est une option de conception durable – au lieu d’acheter cinq robots différents pour cinq objectifs différents, nous pouvons construire de nombreux robots différents en utilisant les mêmes composants. Les robots fabriqués à partir de modules reconfigurables pourraient être réarrangés à la demande pour offrir une plus grande polyvalence que les systèmes spécialisés, ce qui pourrait être bénéfique dans les environnements aux ressources limitées« .
Les robots modulaires se réarrangent selon les besoins, offrant une flexibilité supérieure aux systèmes spécialisés. Cette approche s’avère particulièrement avantageuse dans les environnements aux ressources limitées.
Source/ Institut Max Planck
Légende illustration : Chaîne de modules Hexel avec Ellen Rumley à gauche et Zach Yoder à droite. © MPI-IS / Wolfram Scheible