Des chercheurs en physique et en ingénierie de Cornell ont créé le plus petit robot marcheur à ce jour. Sa mission : être suffisamment petit pour interagir avec les ondes de la lumière visible tout en se déplaçant de manière autonome, afin de pouvoir se rendre à des endroits spécifiques – dans un échantillon de tissu, par exemple – pour prendre des images et mesurer les forces à l’échelle de certaines des plus petites structures de l’organisme.
« Un robot marcheur suffisamment petit pour interagir avec la lumière et la façonner prend la lentille d’un microscope et la place directement dans le micromonde », a déclaré Paul McEuen, professeur émérite de sciences physiques John A. Newman au College of Arts and Sciences (A&S), qui a dirigé l’équipe. « Il peut réaliser des images rapprochées comme un microscope ordinaire ne pourrait jamais le faire »
Les scientifiques de Cornell détiennent déjà le record mondial du plus petit robot marcheur (40-70 microns).
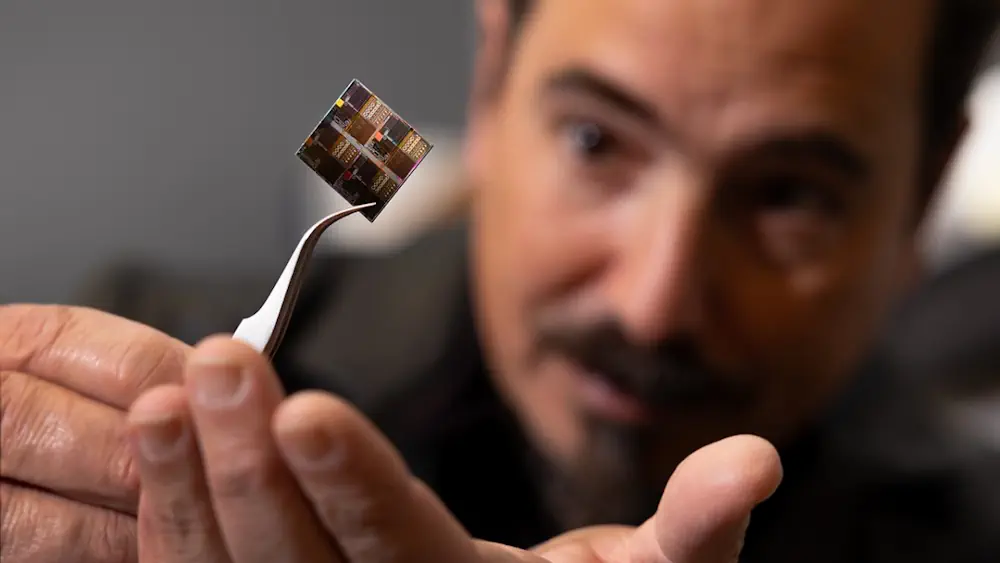
Les nouveaux robots diffractifs vont « pulvériser ce record », a déclaré Itai Cohen, professeur de physique (A&S) et coauteur de l’étude. « Ces robots mesurent entre 5 et 2 microns. Ils sont minuscules. Et nous pouvons leur faire faire ce que nous voulons en contrôlant les champs magnétiques qui régissent leurs mouvements ».
La robotique diffractive relie, pour la première fois, des robots non attachés à des techniques d’imagerie qui dépendent de la diffraction de la lumière visible – la courbure d’une onde lumineuse lorsqu’elle passe à travers une ouverture ou autour de quelque chose. La technique d’imagerie nécessite une ouverture d’une taille comparable à la longueur d’onde de la lumière. Pour que l’optique fonctionne, les robots doivent être à cette échelle, et pour que les robots atteignent les cibles à imager, ils doivent être capables de se déplacer seuls. L’équipe de Cornell a atteint ces deux objectifs.
Fonctionnement et contrôle des robots
Contrôlés par des aimants effectuant un mouvement de pincement, les robots peuvent avancer sur une surface solide. Ils peuvent également « nager » dans des liquides en utilisant le même mouvement.
La combinaison de la maniabilité, de la flexibilité et de la technologie optique subdiffractive constitue une avancée significative dans le domaine de la robotique, ont déclaré les chercheurs.
« Je suis vraiment enthousiasmé par cette convergence de la microrobotique et de la microoptique », a souligné Francesco Monticone, coauteur et professeur agrégé d’ingénierie électrique et informatique à Cornell Engineering, qui a conçu les éléments optiques diffractifs et a aidé l’équipe à identifier les applications. « La miniaturisation de la robotique a enfin atteint un point où ces systèmes mécaniques d’actionnement peuvent interagir avec la lumière et la façonner activement à l’échelle de quelques longueurs d’onde seulement, soit un million de fois moins qu’un mètre. »
Pour actionner magnétiquement des robots à cette échelle, l’équipe a modelé les robots avec des centaines d’aimants à l’échelle du nanomètre qui ont un volume égal de matériau mais deux formes différentes – longue et fine, ou courte et courte. Selon M. Cohen, l’idée est venue du physicien Jizhai Cui de l’université de Fudan.
« Les longs et minces ont besoin d’un champ magnétique plus important pour passer d’une orientation à l’autre, tandis que les courts et trapus ont besoin d’un champ plus faible », a expliqué M. Cohen. « Cela signifie que vous pouvez appliquer un champ magnétique important pour les aligner tous, mais que si vous appliquez un champ magnétique plus faible, vous n’inverserez que les plus courts et les plus courts. »
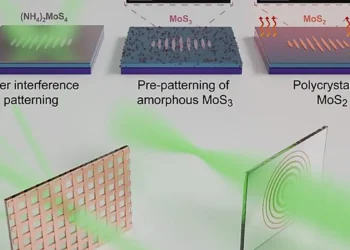
Les scientifiques de Cornell ont combiné ce principe avec des films très fins inventés au Cornell Nanoscale Science and Technology Facility pour créer les robots.
Défis et applications
L’un des principaux défis de l’ingénierie optique a été de trouver l’approche la plus appropriée pour les trois tâches – réglage de la lumière, focalisation et imagerie de super-résolution – pour cette plateforme spécifique, car « les différentes approches ont des compromis de performance différents en fonction de la façon dont le microrobot peut se déplacer et changer de forme », a ajouté Monticone.
La possibilité de déplacer mécaniquement les éléments diffractants afin d’améliorer l’imagerie présente un avantage, a expliqué M. Cohen. Le robot lui-même peut être utilisé comme gradation de la diffraction, ou une lentille diffractive peut être ajoutée. De cette manière, les robots peuvent agir comme une extension locale de l’objectif du microscope regardant vers le bas depuis le haut.
Les robots mesurent les forces en utilisant le même mouvement de pincement commandé par un aimant qui leur permet de marcher pour pousser contre les structures.
« Ces robots sont des ressorts très souples. Ainsi, lorsque quelque chose pousse contre eux, le robot peut se contracter », a commenté M. Cohen. « Cela modifie le schéma de diffraction, et nous pouvons le mesurer de manière très satisfaisante ».
Les capacités optiques et de mesure de la force peuvent être appliquées à la recherche fondamentale, comme dans les explorations de la structure de l’ADN, ont déclaré les chercheurs. Elles pourraient également être déployées dans un cadre clinique.
« Dans le futur, je peux imaginer des essaims de microbots diffractifs effectuant des tâches de microscopie à super-résolution et d’autres tâches de détection tout en marchant sur la surface d’un échantillon », a conclu M. Monticone. « Je pense que nous ne faisons qu’effleurer la surface de ce qui est possible avec ce nouveau paradigme mariant la robotique et l’ingénierie optique à l’échelle microscopique. »
L’article de l’équipe, intitulé « Magnetically Programmed Diffractive Robotics » (Robotique diffractive programmée magnétiquement), a été publié le 28 novembre dans Science, M. McEuen étant l’auteur correspondant. Conrad Smart, chercheur au Laboratory of Atomic and Solid State Physics (LASSP) de Cornell, et Tanner Pearson, Ph.D. ’22, sont les co-premiers auteurs de l’étude. 10.1126/science.adr2177
La recherche a été rendue possible par le Cornell Center for Materials Research, la National Science Foundation et le Cornell NanoScale Science and Technology Facility. Les auteurs ayant contribué à l’étude sont Zexi Liang, associé postdoctoral au LAASP, Melody X. Lim, chercheur expérimental à l’Institut Kavli de Cornell pour la science à l’échelle nanométrique (KIC), et Mohamed I. Abdelrahman, doctorant en génie électrique et informatique à l’Institut d’ingénierie de Cornell.
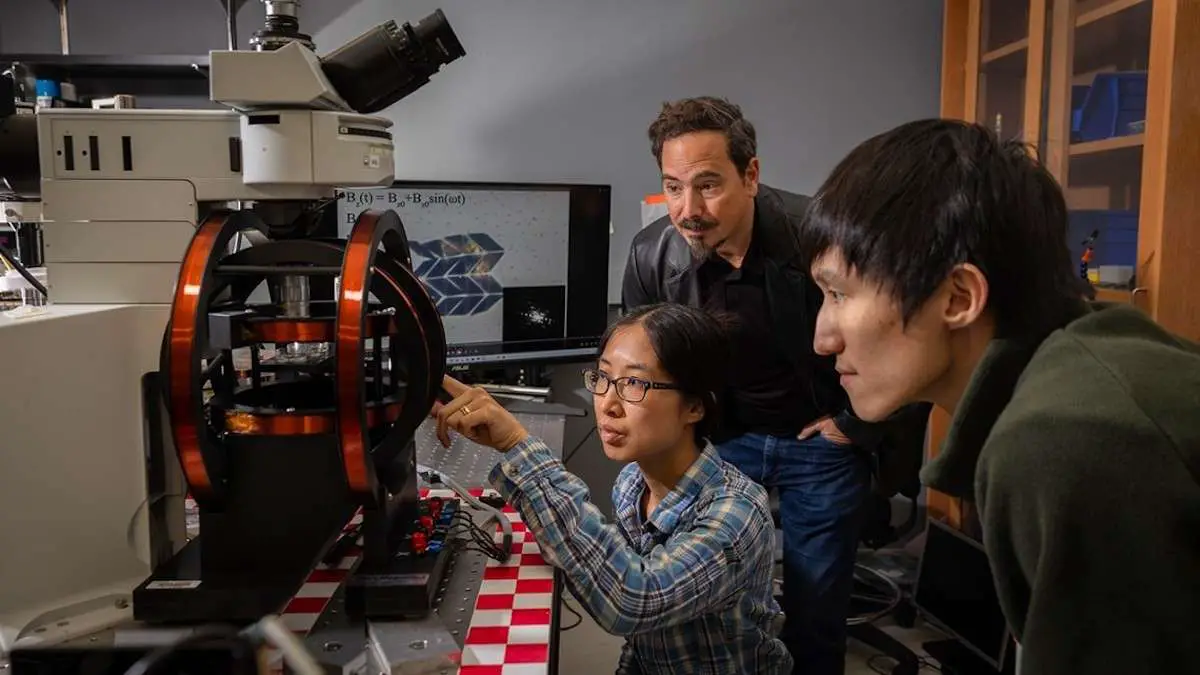
Légende illustration : Itai Cohen, au centre, professeur de physique et de design technique, travaille avec Melody Lim, à gauche, et Zexi Liang, à droite, dans le laboratoire de Cohen, dans le bâtiment des sciences physiques. Crédit : Jason Koski/Cornell University