Des scientifiques s’inspirant du système nerveux de la pieuvre ont mis au point un robot capable de décider comment déplacer ou saisir des objets en détectant son environnement. L’équipe de la faculté des sciences et de l’ingénierie de l’université de Bristol a conçu un robot simple mais intelligent qui utilise des flux d’air ou d’eau pour coordonner la succion et le mouvement, comme le font les pieuvres avec leurs centaines de ventouses et leurs multiples bras.
L’étude, publiée aujourd’hui dans la revue Science Robotics, montre comment un robot souple peut utiliser le flux de succion non seulement pour adhérer à des objets, mais aussi pour détecter son environnement et contrôler ses propres actions, comme le fait une pieuvre. Un seul système de succion permet au robot de saisir des objets délicats, de savoir s’il touche de l’air, de l’eau ou une surface rugueuse, et même de prédire la force avec laquelle quelque chose tire sur lui, le tout en même temps, sans avoir besoin d’un ordinateur central.
L’auteur principal, Tianqi Yue, précise : « L’année dernière, nous avons mis au point une ventouse artificielle qui imitait la façon dont les pieuvres se collent aux rochers en utilisant des matériaux souples et l’étanchéité de l’eau. »
Cette recherche s’inscrit dans le prolongement de ce travail, de l’utilisation d’une ventouse comme celle d’une pieuvre pour se connecter à des objets à l’utilisation d’une « intelligence de succion incarnée » – imitant les aspects clés de la structure neuromusculaire de la pieuvre dans des systèmes robotiques souples. »
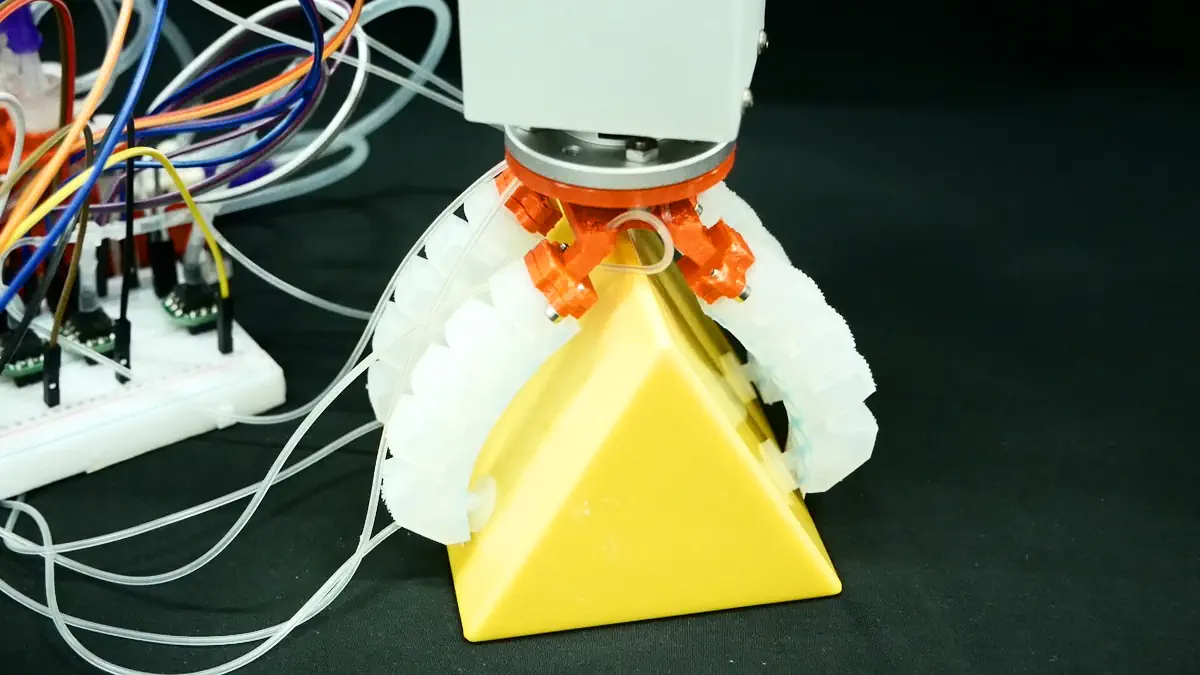
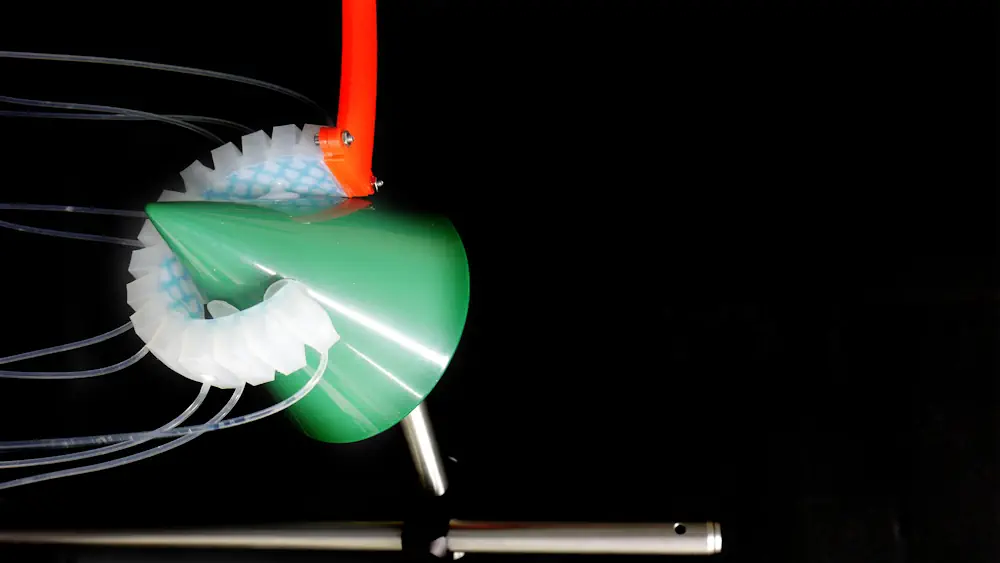
L’intelligence de la succion fonctionne à deux niveaux : en couplant le flux de succion avec des circuits fluidiques locaux, les robots souples peuvent atteindre une intelligence incarnée de bas niveau semblable à celle de la pieuvre, notamment en saisissant délicatement des objets délicats, en se courbant de manière adaptative et en encapsulant des objets de géométries inconnues. En décodant la réponse à la pression d’une ventouse, les robots peuvent parvenir à une perception de haut niveau, notamment la détection des contacts, la classification de l’environnement et de la rugosité de la surface, ainsi que la prédiction de la force de traction interactive.
Cette intelligence de la ventouse, simple et peu coûteuse, pourrait déboucher sur une nouvelle génération de robots souples plus sûrs, plus intelligents et plus économes en énergie. Parmi les utilisations potentielles, citons la cueillette des fruits en douceur dans l’agriculture, la manipulation d’objets fragiles dans les usines, l’ancrage d’outils médicaux dans le corps humain ou la création de jouets souples et d’outils portables capables d’interagir en toute sécurité avec les personnes.
L’équipe travaille actuellement à rendre le système plus petit et plus robuste pour une utilisation dans le monde réel. Elle souhaite également l’associer à des matériaux intelligents et à l’IA afin d’améliorer sa capacité d’adaptation et de prise de décision dans des environnements complexes.
« Il est fascinant de constater qu’une simple ventouse, sans électronique à l’intérieur, peut ressentir, penser et agir, tout comme le bras d’une pieuvre », conclut Tianqi. « Cela pourrait aider les robots à devenir plus naturels, plus doux et plus intuitifs. »
Article : « Embodying soft robots with octopus-inspired hierarchical suction intelligence » par Tianqi Yue, Chenghua Lu, Kailuan Tang, Qiukai Qi, Zhenyu Lu, Loong Yi Lee, Hermes Bloomfield-Gadȇlha, et Jonathan Rossiter dans Science Robotics. DOI : 10.1126/scirobotics.adr4264
Source : U. Bristol
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.