Des chercheurs ont fait un grand pas en avant dans la mise au point de robots sauteurs de la taille d’un insecte, capables d’effectuer des tâches dans les petits espaces que l’on trouve souvent dans les secteurs de la mécanique, de l’agriculture et de la recherche et du sauvetage.
Une nouvelle étude dirigée par Sameh Tawfick, professeur de sciences mécaniques et d’ingénierie, présente une série de robots de la taille d’un hanneton, suffisamment petits pour s’intégrer dans des espaces restreints, suffisamment puissants pour manœuvrer au-dessus des obstacles et suffisamment rapides pour s’adapter au temps de fuite rapide d’un insecte.
Les résultats sont publiés dans la revue Proceedings of the National Academy of Sciences.
Des chercheurs de l’université de l’Illinois et de l’université de Princeton ont étudié l’anatomie, la mécanique et l’évolution du ténébrion au cours de la dernière décennie. Une étude réalisée en 2020 a révélé que le flambage – la libération rapide de l’énergie élastique – d’un muscle enroulé dans le thorax du ténébrion est déclenché pour permettre à ce dernier de se propulser dans l’air sur plusieurs fois la longueur de son corps, afin de se redresser s’il se retourne sur le dos.
« L’un des grands défis de la robotique à petite échelle est de trouver une conception qui soit à la fois petite et suffisamment puissante pour contourner les obstacles ou s’échapper rapidement de situations dangereuses« , a déclaré Tawfick.
Dans la nouvelle étude, Tawfick et son équipe ont utilisé de minuscules actionneurs enroulés – analogues aux muscles des animaux – qui tirent sur un mécanisme en forme de poutre, le faisant lentement se déformer et stocker de l’énergie élastique jusqu’à ce qu’elle soit spontanément libérée et amplifiée, propulsant les robots vers le haut.
« Ce processus, appelé cascade de flambage dynamique, est simple par rapport à l’anatomie d’un ténébrion« , a déclaré Tawfick. « Cependant, la simplicité a du bon dans ce cas, car elle nous permet de travailler et de fabriquer des pièces à cette petite échelle« .
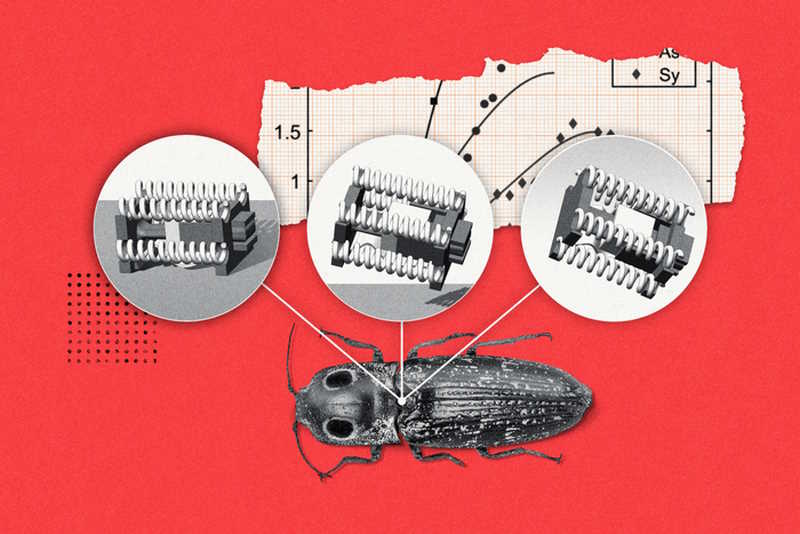
Guidée par l’évolution biologique et les modèles mathématiques, l’équipe a construit et testé quatre variantes du dispositif, atterrissant sur deux configurations qui peuvent sauter avec succès sans intervention manuelle.
« Pour l’avenir, nous n’avons pas d’approche définie sur la conception exacte de la prochaine génération de ces robots, mais cette étude plante une graine dans l’évolution de cette technologie – un processus similaire à l’évolution biologique« , a déclaré Tawfick.
L’équipe imagine ces robots accéder à des espaces restreints pour aider à effectuer la maintenance de grandes machines comme les turbines et les moteurs à réaction, par exemple en prenant des photos pour identifier les problèmes.
« Nous imaginons également des robots à l’échelle des insectes utiles dans l’agriculture moderne« , a déclaré Tawfick. « Les scientifiques et les agriculteurs utilisent actuellement des drones et des rovers pour surveiller les cultures, mais parfois les chercheurs ont besoin d’un capteur pour toucher une plante ou pour capturer une photographie d’un élément à très petite échelle. Les robots à l’échelle de l’insecte peuvent le faire« .
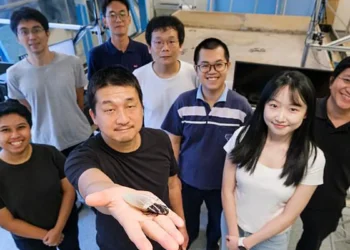
Légende : Sameh Tawfick, professeur de sciences mécaniques et d’ingénierie, a dirigé une nouvelle étude présentant des robots de la taille d’un scarabée à cliquer, suffisamment petits pour s’insérer dans des espaces restreints, assez puissants pour manœuvrer au-dessus des obstacles et assez rapides pour égaler le temps de fuite rapide d’un insecte.
Crédit image / Graphic by Michael Vincent
Des chercheurs de l’université de Birmingham, au Royaume-Uni, de l’université d’Oxford et de l’université du Texas à Dallas ont également participé à cette recherche.
La Defense Advanced Research Projects Agency, le Toyota Research Institute North America, la National Science Foundation et la Royal Society ont soutenu cette étude.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.