Les véhicules sous-marins sont généralement conçus pour une vitesse de croisière, et ils sont souvent inefficaces à d’autres vitesses. La technologie est rudimentaire comparée à la façon dont les poissons nagent bien, rapidement ou lentement.
Que se passe-t-il si vous voulez que votre véhicule sous-marin se déplace rapidement sur des kilomètres d’océan, puis ralentisse pour cartographier un récif corallien étroit, ou se rende à toute vitesse sur le site d’une marée noire, puis ralentisse pour prendre des mesures précises ?
Dan Quinn, professeur adjoint à l’école d’ingénierie et de sciences appliquées de l’université de Virginie, et son collègue Qiang Zhong, récemment diplômé de l’université et chercheur postdoctoral, ont découvert une stratégie clé pour permettre ce type de missions à plusieurs vitesses. Ils ont démontré une manière simple de mettre en œuvre cette stratégie dans des robots, ce qui pourrait à terme informer la conception de véhicules sous-marins. Leurs travaux ont été récemment publiés dans Science Robotics.
Lors de la conception de robots nageurs, une question qui revient sans cesse pour les chercheurs est de savoir quelle doit être la rigidité de la pièce qui propulse les robots dans l’eau. C’est une question difficile, car la même rigidité qui fonctionne bien dans certaines situations peut échouer lamentablement dans d’autres.
« Avoir une seule rigidité de la queue, c’est comme avoir un seul rapport de vitesse sur un vélo« , a déclaré M. Quinn, qui est titulaire d’une double nomination en génie mécanique et aérospatial et en génie électrique et informatique. « Vous ne seriez efficace qu’à une seule vitesse. Ce serait comme traverser San Francisco à vélo avec un vélo à pignon fixe ; vous seriez épuisé après seulement quelques pâtés de maisons.«
Il est probable que les poissons résolvent ce problème en ajustant leur rigidité en temps réel : Ils ajustent différents niveaux de rigidité en fonction de la situation.
Le problème, c’est qu’il n’existe aucun moyen connu de mesurer la rigidité d’un poisson qui nage, et il est donc difficile de savoir si et comment les poissons font cela. Quinn et Zhong ont résolu ce problème en combinant la dynamique des fluides et la biomécanique pour dériver un modèle expliquant comment et pourquoi la rigidité de la queue doit être ajustée.
« De manière surprenante« , a déclaré Quinn, « un résultat simple est ressorti de tous ces calculs : La rigidité devrait augmenter avec le carré de la vitesse de nage.«
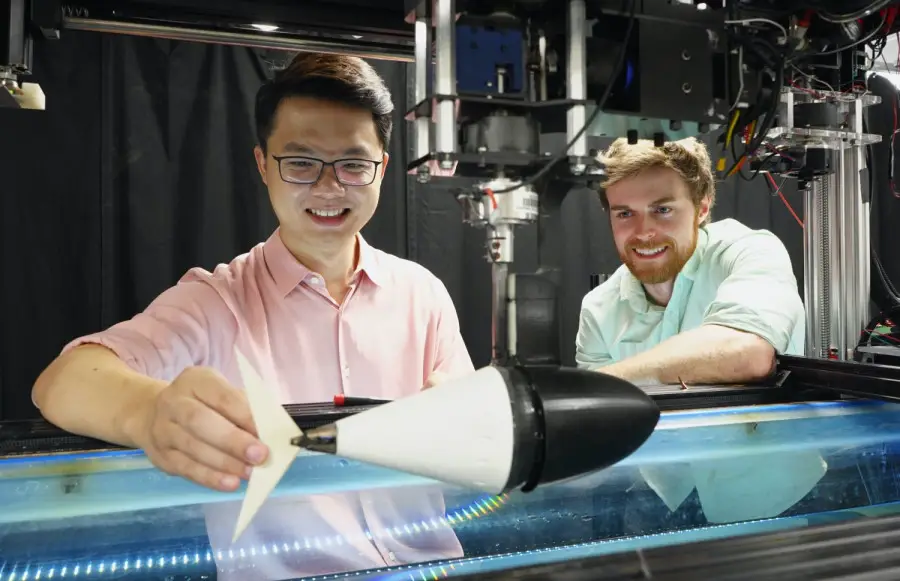
« Pour tester notre théorie, nous avons construit un robot ressemblant à un poisson qui utilise un tendon artificiel programmable pour régler la rigidité de sa queue tout en nageant dans un canal d’eau. Tout à coup, notre robot a pu nager sur une plus grande plage de vitesses tout en utilisant presque moitié moins d’énergie que le même robot avec une queue à rigidité fixe. L’amélioration était vraiment remarquable. »
« Notre travail est le premier à combiner la biomécanique, la dynamique des fluides et la robotique pour étudier de manière exhaustive la rigidité de la queue, ce qui permet de lever le voile sur le mystère qui a longtemps existé sur la manière dont la rigidité de la queue affecte les performances de nage« , a déclaré Zhong. « Ce qui est encore plus fantastique, c’est que nous ne nous concentrons pas seulement sur l’analyse théorique, mais que nous proposons également un guide pratique pour la rigidité réglable. La stratégie de rigidité accordable que nous proposons s’est avérée efficace dans des missions de natation réalistes, où un poisson robot a atteint simultanément une vitesse élevée et une grande efficacité de nage.«
Maintenant que l’équipe a modélisé les avantages de la rigidité accordable, elle va étendre son modèle à d’autres types de nage. Le premier robot a été conçu comme un thon ; l’équipe réfléchit maintenant à la manière dont elle pourrait s’adapter aux dauphins ou aux têtards. Elle construit également un robot qui imite les mouvements ondulatoires des raies.
« Je ne pense pas que nous soyons à court de projets de sitôt. Chaque animal aquatique que nous avons étudié nous a donné de nouvelles idées sur la façon de construire de meilleurs robots nageurs. Et il y a encore beaucoup de poissons dans la mer« , a déclaré M. Quinn.
Légende : Le professeur adjoint Dan Quinn, à droite, et le chercheur postdoctoral Qiang Zhong avec le thon robotisé qu’ils ont conçu pour avoir une queue à la rigidité réglable.