L’art de l’empaquetage, une tâche qui peut sembler simple pour l’homme, représente un défi de taille pour les robots. Des chercheurs du MIT ont mis au point une méthode innovante pour aider les robots à résoudre ce type de problèmes complexes.
La manipulation d’objets et leur arrangement dans un espace donné, comme le chargement d’une valise ou l’organisation d’une étagère, nécessite la prise en compte de nombreuses contraintes. Les robots, pour accomplir ces tâches, doivent éviter les collisions, respecter l’ordre de placement des objets et garantir leur stabilité.
Les méthodes traditionnelles abordent ce problème de manière séquentielle, en proposant une solution partielle qui répond à une contrainte à la fois, puis en vérifiant si d’autres contraintes ont été violées. Cependant, cette approche peut s’avérer extrêmement chronophage, surtout lorsque la séquence d’actions est longue et que le nombre d’objets à manipuler est important.
Une nouvelle approche basée sur l’intelligence artificielle
Les chercheurs du MIT ont utilisé une forme d’intelligence artificielle générative, appelée modèle de diffusion, pour résoudre ce problème de manière plus efficace. Leur méthode utilise une collection de modèles d’apprentissage automatique, chacun étant formé pour représenter un type spécifique de contrainte. Ces modèles sont combinés pour générer des solutions globales au problème d’emballage, en tenant compte de toutes les contraintes à la fois.
Leur méthode a été capable de générer des solutions efficaces plus rapidement que d’autres techniques, et elle a produit un plus grand nombre de solutions réussies dans le même laps de temps. De plus, leur technique a également pu résoudre des problèmes avec de nouvelles combinaisons de contraintes et un plus grand nombre d’objets, que les modèles n’avaient pas vus pendant l’entraînement.
Grâce à cette généralisation, leur technique peut être utilisée pour enseigner aux robots comment comprendre et répondre aux contraintes globales des problèmes d’emballage, tels que l’importance d’éviter les collisions ou le désir qu’un objet soit à côté d’un autre objet. Les robots formés de cette manière pourraient être appliqués à un large éventail de tâches complexes dans des environnements divers, de l’exécution des commandes dans un entrepôt à l’organisation d’une bibliothèque dans la maison de quelqu’un.
En synthèse
Les chercheurs du MIT ont développé une méthode basée sur l’intelligence artificielle pour aider les robots à résoudre des problèmes complexes de manipulation d’objets. En utilisant une collection de modèles d’apprentissage automatique, chacun formé pour représenter un type spécifique de contrainte, ils ont réussi à générer des solutions globales à des problèmes d’emballage.
Cette méthode a montré une efficacité supérieure à d’autres techniques, produisant un plus grand nombre de solutions réussies dans le même laps de temps. Elle a démontré également une capacité à résoudre des problèmes avec de nouvelles combinaisons de contraintes et un plus grand nombre d’objets. Cette avancée pourrait permettre aux robots d’accomplir un large éventail de tâches complexes dans divers environnements.

Pour une meilleure compréhension
1. Qu’est-ce que le modèle de diffusion utilisé par les chercheurs du MIT ?
Le modèle de diffusion est une forme d’intelligence artificielle générative utilisée par les chercheurs du MIT pour résoudre plus efficacement les problèmes de manipulation robotique. Ce modèle utilise une collection de modèles d’apprentissage automatique, chacun formé pour représenter un type spécifique de contrainte. Ces modèles sont combinés pour générer des solutions globales aux problèmes de manipulation, en tenant compte de toutes les contraintes à la fois.
2. Comment le modèle de diffusion se compare-t-il aux méthodes traditionnelles ?
Les méthodes traditionnelles abordent les problèmes de manipulation de manière séquentielle, en proposant une solution partielle qui répond à une contrainte à la fois, puis en vérifiant si d’autres contraintes ont été violées. Cette approche peut être extrêmement chronophage, surtout lorsque la séquence d’actions est longue et que le nombre d’objets à manipuler est important. Le modèle de diffusion, en revanche, est capable de générer des solutions efficaces plus rapidement et de produire un plus grand nombre de solutions réussies dans le même laps de temps.
3. Quels sont les avantages du modèle de diffusion ?
Le modèle de diffusion est non seulement plus rapide et plus efficace que les méthodes traditionnelles, mais il est également capable de résoudre des problèmes avec de nouvelles combinaisons de contraintes et un plus grand nombre d’objets, que les modèles n’ont pas vus pendant l’entraînement. Cela signifie qu’il peut être utilisé pour enseigner aux robots comment comprendre et répondre aux contraintes globales des problèmes de manipulation, tels que l’importance d’éviter les collisions ou le désir qu’un objet soit à côté d’un autre objet.
4. Dans quels types de tâches le modèle de diffusion peut-il être appliqué ?
Les robots formés avec le modèle de diffusion pourraient être appliqués à un large éventail de tâches complexes dans divers environnements, de l’exécution des commandes dans un entrepôt à l’organisation d’une bibliothèque dans la maison de quelqu’un.
5. Quels sont les futurs développements prévus pour le modèle de diffusion ?
Les chercheurs du MIT souhaitent tester le modèle de diffusion dans des situations plus compliquées, comme avec des robots qui peuvent se déplacer dans une pièce. Ils veulent également permettre au modèle de diffusion de résoudre des problèmes dans différents domaines sans avoir besoin d’être ré-entraîné sur de nouvelles données.
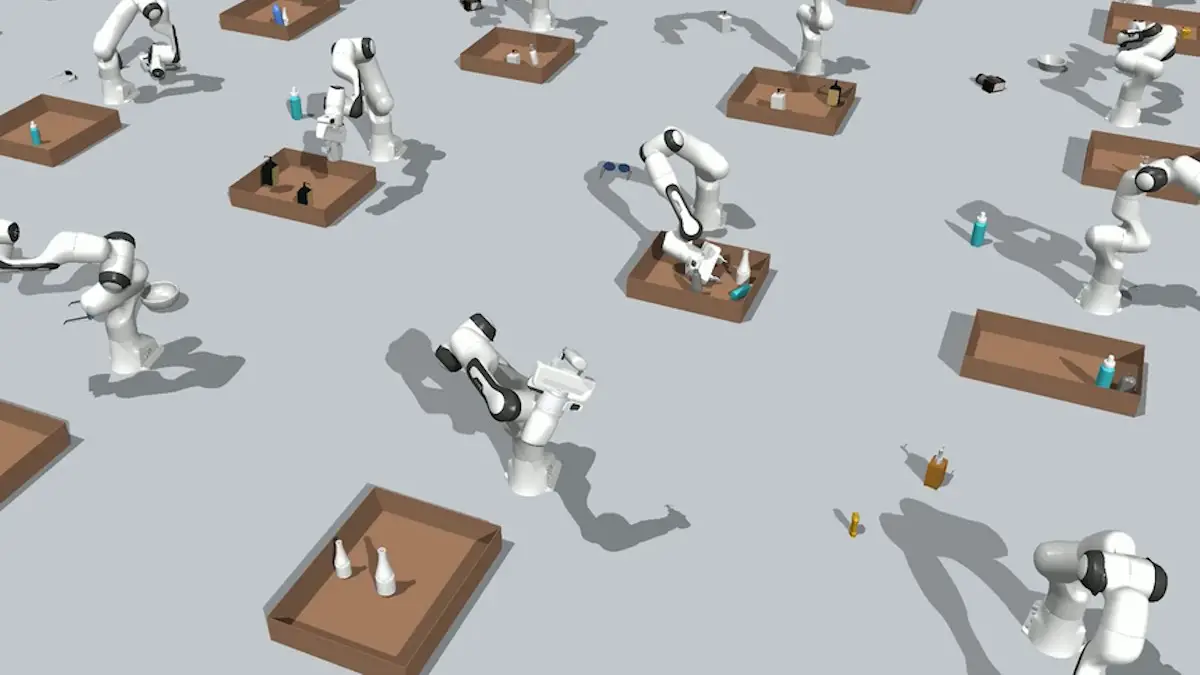
Légende illustration principale : Des chercheurs du MIT utilisent des modèles d’IA générative pour aider les robots à résoudre plus efficacement les problèmes de manipulation d’objets complexes, tels que l’emballage d’une boîte avec différents objets. Crédits : Avec l’aimable autorisation des chercheurs