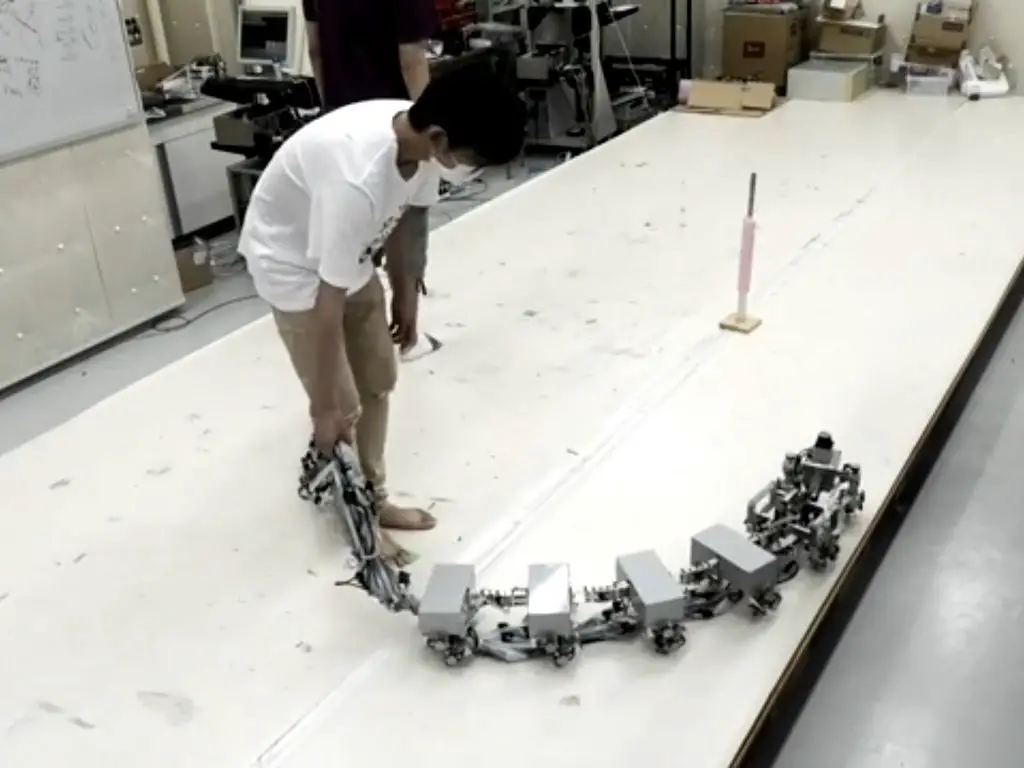
Dans une avancée remarquable, des chercheurs de l’Université d’Osaka ont mis au point un nouveau robot ressemblant à un mille-pattes, capable de modifier son mouvement entre la marche en ligne droite et la marche courbée. Cette innovation pourrait révolutionner les opérations de recherche et de sauvetage, ainsi que l’exploration planétaire.
Le Département de Mécanique et Bio-ingénierie de l’Université d’Osaka a été à l’origine de cette invention fascinante. Les scientifiques ont créé un robot marcheur qui utilise l’instabilité dynamique pour se déplacer. En modifiant la flexibilité des connexions, le robot peut tourner sans nécessiter de systèmes de contrôle computationnels complexes. Les implications de cette découverte pourraient aider à la conception de robots de sauvetage capables de traverser des terrains accidentés.
Sur Terre, la plupart des animaux ont développé un système de locomotion robuste à l’aide de jambes, offrant une grande mobilité dans des environnements variés. Malheureusement, les ingénieurs ont souvent constaté que les robots à pattes sont étonnamment fragiles. La défaillance d’une seule patte peut gravement entraver la fonctionnalité de ces robots. De plus, le contrôle d’un grand nombre d’articulations nécessite beaucoup de puissance informatique.
Une amélioration de cette conception serait extrêmement utile pour construire des robots autonomes ou semi-autonomes capables d’entrer dans des zones dangereuses.
Les chercheurs de l’Université d’Osaka ont récemment publié une étude dans Soft Robotics, où ils décrivent leur robot biomimétique « myriapode ». Ce robot, composé de six segments, chaque segment étant relié à deux jambes, présente des articulations flexibles. La flexibilité des connexions peut être modifiée avec des moteurs pendant la marche.
Les chercheurs ont démontré que l’augmentation de la flexibilité des articulations conduisait à une situation appelée « bifurcation à la fourche », où la marche en ligne droite devient instable. Au lieu de cela, le robot passe à une marche courbée, soit vers la droite, soit vers la gauche. Nous avons été inspirés par la capacité de certains insectes extrêmement agiles à contrôler l’instabilité dynamique de leur propre mouvement pour induire des changements rapides de mouvement », déclare Shinya Aoi, co-auteur de l’étude. Cette approche permet de réduire considérablement la complexité computationnelle et les exigences énergétiques.
L’équipe a testé la capacité du robot à atteindre des emplacements spécifiques et a découvert qu’il pouvait naviguer en prenant des chemins courbés vers des cibles. « Nous pouvons prévoir des applications dans une grande variété de scénarios, comme la recherche et le sauvetage, le travail dans des environnements dangereux ou l’exploration d’autres planètes« , déclare Mau Adachi, un autre auteur de l’étude. Les versions futures pourraient inclure des segments supplémentaires et des mécanismes de contrôle.
Cette avancée technologique majeure marque une nouvelle étape dans le développement de robots autonomes et promet d’ouvrir des perspectives passionnantes pour l’avenir.
L’article « Maneuverable and efficient locomotion of a myriapod robot with variable body-axis flexibility via instability and bifurcation » a été publié dans Soft Robotics à l’adresse suivante : https://doi.org/10.1089/soro.2022.0177.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.