Dans le domaine de la robotique, une nouvelle conception de robot doux a vu le jour, capable de réaliser trois comportements simultanés : rouler en avant, tourner comme un disque et suivre une trajectoire orbitale autour d’un point central. Ces robots, appelés Twisted Ringbots, pourraient révolutionner la manière dont nous explorons et cartographions des environnements inconnus.
Le fonctionnement des Twisted Ringbots
Les Twisted Ringbots sont fabriqués à partir d’élastomères de cristaux liquides en forme de ruban, torsadés et reliés en boucle, ressemblant à un bracelet. Lorsqu’ils sont placés sur une surface d’au moins 55° Celsius, la partie du ruban en contact avec la surface se contracte, induisant un mouvement de roulement. Plus la surface est chaude, plus le robot roule rapidement.
« Le ruban roule sur son axe horizontal, donnant à l’anneau un élan vers l’avant », explique Jie Yin, auteur correspondant de l’étude et professeur associé en ingénierie mécanique et aérospatiale à l’Université d’État de Caroline du Nord.
Le Twisted Ringbot tourne également sur son axe central, comme un disque sur une platine. Et en avançant, il se déplace en orbite autour d’un point central, en gros, il se déplace en grand cercle.
Une utilité pour la cartographie des environnements inconnus
Si le Twisted Ringbot rencontre une limite, comme le mur d’une boîte, il se déplacera le long de cette limite. « Ce comportement pourrait être particulièrement utile pour cartographier des environnements inconnus », ajoute Jie Yin.
Les Twisted Ringbots sont des exemples de dispositifs dont le comportement est régi par l’intelligence physique, c’est-à-dire que leurs actions sont déterminées par leur conception structurelle et les matériaux dont ils sont faits, plutôt que d’être dirigés par un ordinateur ou une intervention humaine.
La personnalisation du comportement des Twisted Ringbots
Les chercheurs peuvent affiner le comportement du Twisted Ringbot en modifiant la géométrie du dispositif. Par exemple, ils peuvent contrôler la direction de rotation du Twisted Ringbot en torsadant le ruban dans un sens ou dans l’autre. La vitesse peut être influencée en variant la largeur du ruban, le nombre de torsions dans le ruban, etc.
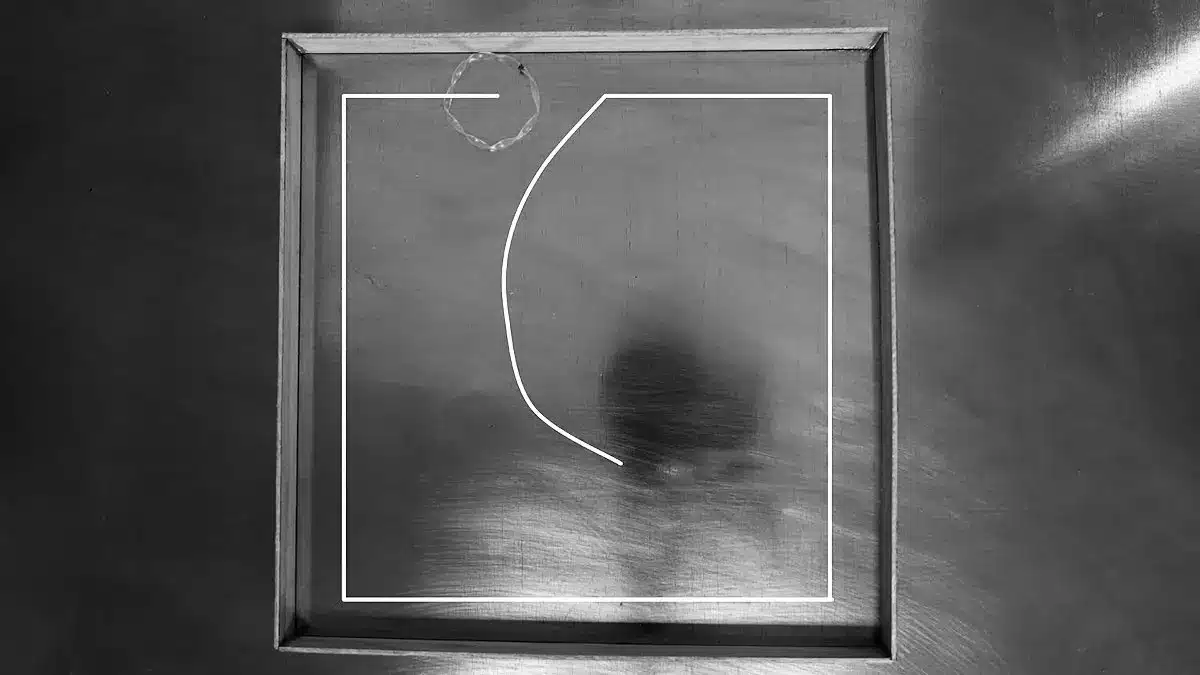
Dans des tests de preuve de concept, les chercheurs ont montré que le Twisted Ringbot était capable de suivre les contours de divers espaces confinés.
« Peu importe où le Twisted Ringbot est introduit dans ces espaces, il est capable de se rendre à une limite et de suivre les lignes de limite pour cartographier les contours de l’espace, qu’il s’agisse d’un carré, d’un triangle, etc. », explique Fangjie Qi, premier auteur de l’article et doctorant à l’Université d’État de Caroline du Nord.
En synthèse
Les Twisted Ringbots représentent une avancée significative dans le domaine de la robotique douce. Leur capacité à se déplacer de manière autonome et à cartographier des environnements inconnus ouvre de nouvelles perspectives pour l’exploration et la cartographie. Leur comportement, déterminé par leur conception structurelle et les matériaux dont ils sont faits, illustre le potentiel de l’intelligence physique dans la robotique.
« En principe, quelle que soit la complexité d’un espace, il serait possible de le cartographier si l’on introduisait suffisamment de ringbots tordus pour cartographier l’ensemble de l’image, chacun d’entre eux en donnant une partie », précise M. Yin. « Et comme ces robots sont relativement peu coûteux à produire, c’est une solution viable. »
« La robotique molle est encore un domaine relativement nouveau », conclut-elle. « Trouver de nouveaux moyens de contrôler le mouvement des robots mous de manière reproductible et technique fait progresser le domaine. Et progresser dans notre compréhension de ce qui est possible est passionnant. »
Pour une meilleure compréhension
Qu’est-ce qu’un Twisted Ringbot ?
Un Twisted Ringbot est un type de robot doux, fabriqué à partir d’élastomères de cristaux liquides en forme de ruban, qui est capable de rouler, de tourner et de suivre une trajectoire orbitale.
Comment fonctionne un Twisted Ringbot ?
Le Twisted Ringbot roule en avant, tourne sur son axe central et suit une trajectoire orbitale lorsqu’il est placé sur une surface d’au moins 55° Celsius.
Quelle est l’utilité des Twisted Ringbots ?
Les Twisted Ringbots peuvent être utilisés pour cartographier des environnements inconnus. Ils sont capables de suivre les contours de divers espaces confinés et de se déplacer le long des limites rencontrées.
Comment le comportement des Twisted Ringbots est-il déterminé ?
Le comportement des Twisted Ringbots est régi par l’intelligence physique, c’est-à-dire qu’il est déterminé par leur conception structurelle et les matériaux dont ils sont faits.
Comment peut-on personnaliser le comportement des Twisted Ringbots ?
Le comportement des Twisted Ringbots peut être affiné en modifiant la géométrie du dispositif, comme la direction de torsion du ruban ou la largeur du ruban.
Références
Fangjie Qi et al, Defected twisted ring topology for autonomous periodic flip–spin–orbit soft robot, Proceedings of the National Academy of Sciences (2024). DOI: 10.1073/pnas.2312680121